System Overview
Hardware Components
The Kerloud flying rover is a hybrid platform combining a multirotor UAV (Unmanned Aerial Vehicle) and a rover, and the first configuration can be viewed as a tricopter rover. Here we take the scorpion series as an example, and main components are depicted in the figure below:
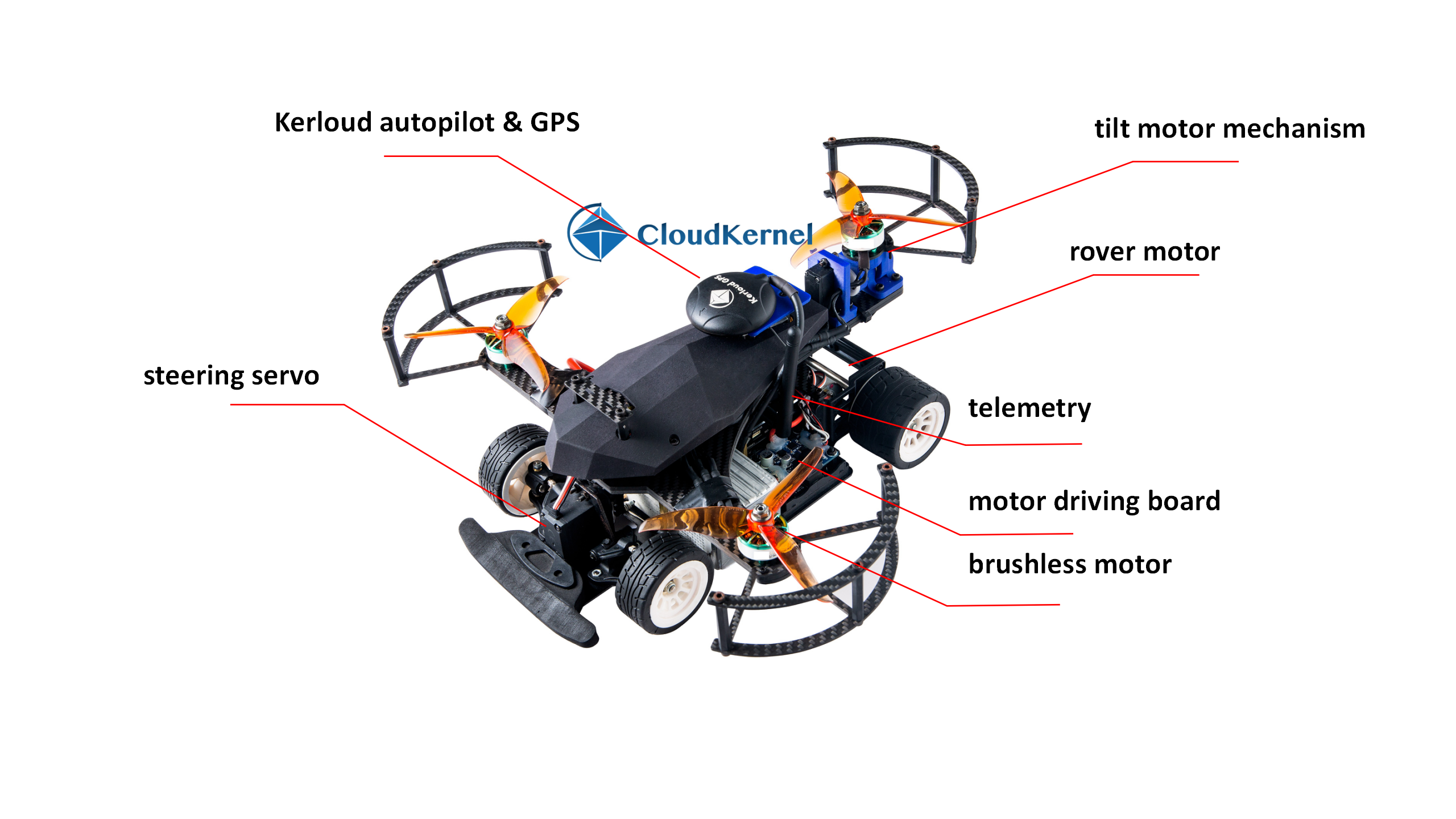
Kerloud autopilot and GPS: the core unit for flight stabilization and rover maneuvering.
Steering servo: a high torque servo unit responsible for rover steering operation.
Brushless motor: the propulsion unit for flight in the multicopter mode.
Rover motor: the main motor for rover propulsion.
Motor driving board: the driving unit for the main motor that accepts an PWM signal input from the autopilot.
Telemetry: the communication device connecting the onboard autopilot with a ground control station.
Tilt motor mechanism: a mechanism at the rear responsible for yaw torque generation.
Note
📌 Details for the Kerloud autopilot can be found in http://cloudkernel-tech.gitee.io/kerloud-autopilot
System Schematics
A typical schematics for the flying rover system can be presented as:
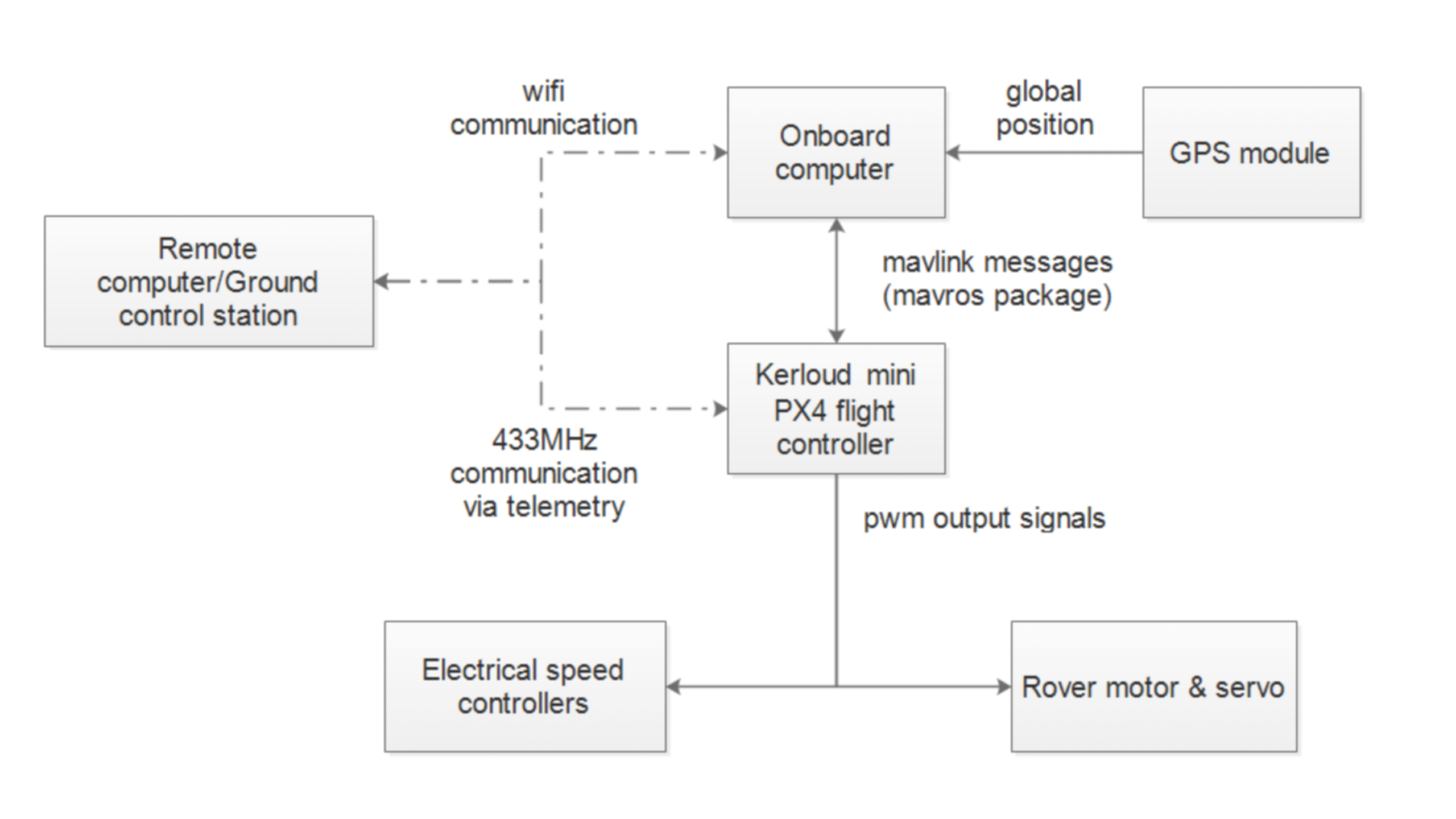
An onboard computer can be employed as a companion computer for high level application development. The Kerloud autopilot generates control signals for low level actuators. The methodology behind this setup is the same with that from the PX4 community.
Note
Details for the PX4 companion computer setup can be found in https://docs.px4.io/master/en/companion_computer/pixhawk_companion.html