系统组成
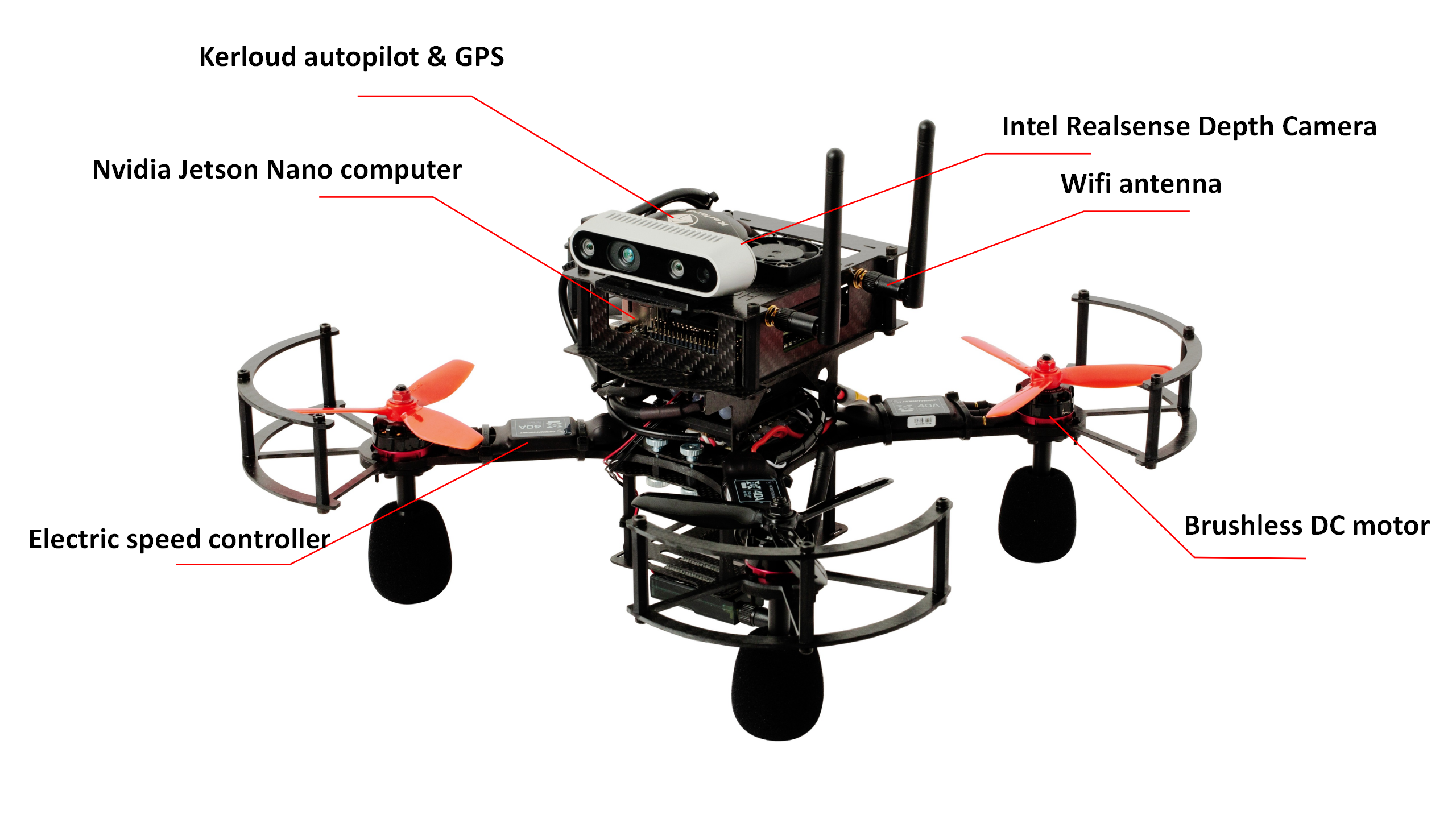
一架典型的Kerloud UAV系列无人机可由如下组件构成:
Kerloud飞行控制器和GPS模块:作为实现稳定飞行的核心单元,遵循PX4软硬件开源设计,飞控在出厂阶段已进行参数适配;
机载电脑:可配备树莓派或英伟达Jetson Nano作为机载电脑,用于任务管理或高端任务处理;
机载摄像头:可装载CSI相机或者其他高级深度相机如Intel Realsense,为任务执行提供视觉信号;
Wifi模块:建立无线通道,使用户可通过计算机实现远程操作,本地网络建立需要路由器。
Hint
📌 关于Kerloud飞行控制器的详细信息参见 https://cloudkernel.cn/kerloud-autopilot
系统信息流示意图如下:
