System Overview
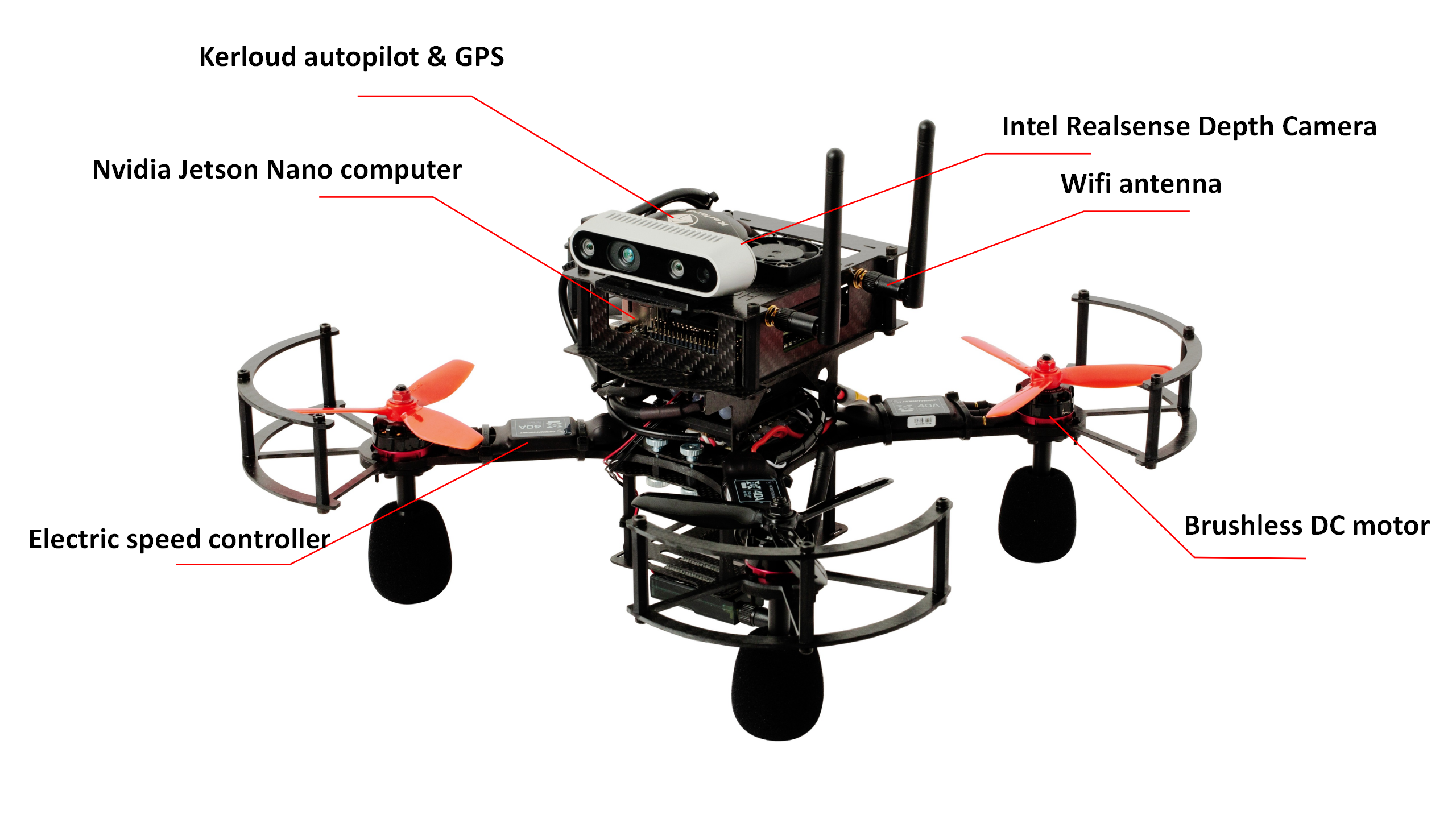
A typical Kerloud UAV set consists of several components as depicted above:
Kerloud autopilot and GPS: the core unit for flight stabilization with PX4 open source hardware and software design, and it is configured with proper parameters in factory.
Onboard computer: Either Raspberry Pi or Nvidia Jetson Nano can serve as the onboard computer responsible for mission management and high level tasks.
Onboard camera: The platform can be equipped with CSI cameras or other advanced depth cameras like Intel Realsense series. The camera delivers the vision signal for mission tasks.
Wifi antenna: The wifi antenna enables the access from a remote computer for user operation, and a wireless router is required to setup a local network.
Note
📌 Details for the Kerloud autopilot can be found in https://cloudkernel.cn/kerloud-autopilot
The schematic for system information flow is shown as:
