快速启动
快速启动流程包含如下步骤:
软硬件工具准备;
RC接收器连接;
固件设置;
桨叶安装;
Position模式下进行手动飞行;
1. 软硬件工具准备
用户在使用前需要准备好下述工具
1.1 硬件工具
一台安装windows11或者ubuntu 18.04系统的计算机
Kerloud无人机
数传天线地面端
遥控器
1.2 软件工具
(1) Qgroundcontrol地面站软件
windows11系统:
百度云下载链接: https://pan.baidu.com/share/init?surl=NJe8LAfI1Qg6n9sEHW54-g 提取码:da2e
ubuntu 18.04系统:
下载后用户需要执行下述指令使软件生效
sudo usermod -a -G dialout $USER
sudo apt-get remove modemmanager -y
sudo apt install gstreamer1.0-plugins-bad gstreamer1.0-libav gstreamer1.0-gl -y
# Then logout and login again to enable the change to user permissions.
chmod +x ./QGroundControl_flyingrover.AppImage
./QGroundControl_flyingrover.AppImage
(2) 数传串口驱动(仅限windows11系统)
百度云下载链接: https://pan.baidu.com/s/1391Qkr-uLmmnIo6WG9F6qg 提取码: gw84
2. RC接收器连接
Kerloud UAV系列默认发货清单中不含RC接收机、发射机,建议用户选用支持SBUS协议的型号。 我们需要将RC接收机接入Pixhawk飞控,机身预留的接入排线如下所示:

建议用户使用魔术贴将RC接收机固定到机身,同时需注意避免接收机的天线被桨叶损坏。
3. 固件设置
机体内的Pixhawk飞控单元已加载基于V1.10.0版本的稳定px4固件,其参数在出厂阶段已通过实际飞行测试调优。 通常情况下,用户无需更改姿态、位置控制增益这类板载参数。px4的官方设置可参考: https://dev.px4.io/master/en/setup/config_initial.html。 出于运输环节振动和地区差异考虑,强烈建议用户对罗盘、陀螺仪、加速度计传感器进行校准,以避免出现未知的异常。 使用Micro USB线或者数传天线将pixhawk飞控连接到一台运行Qgroundcontrol (QGC) 的电脑,可以轻松实现传感器校准。
机体设置:
Kerloud UAV系列机体默认为通用四轴无人机,不需要额外设置,如下所示:
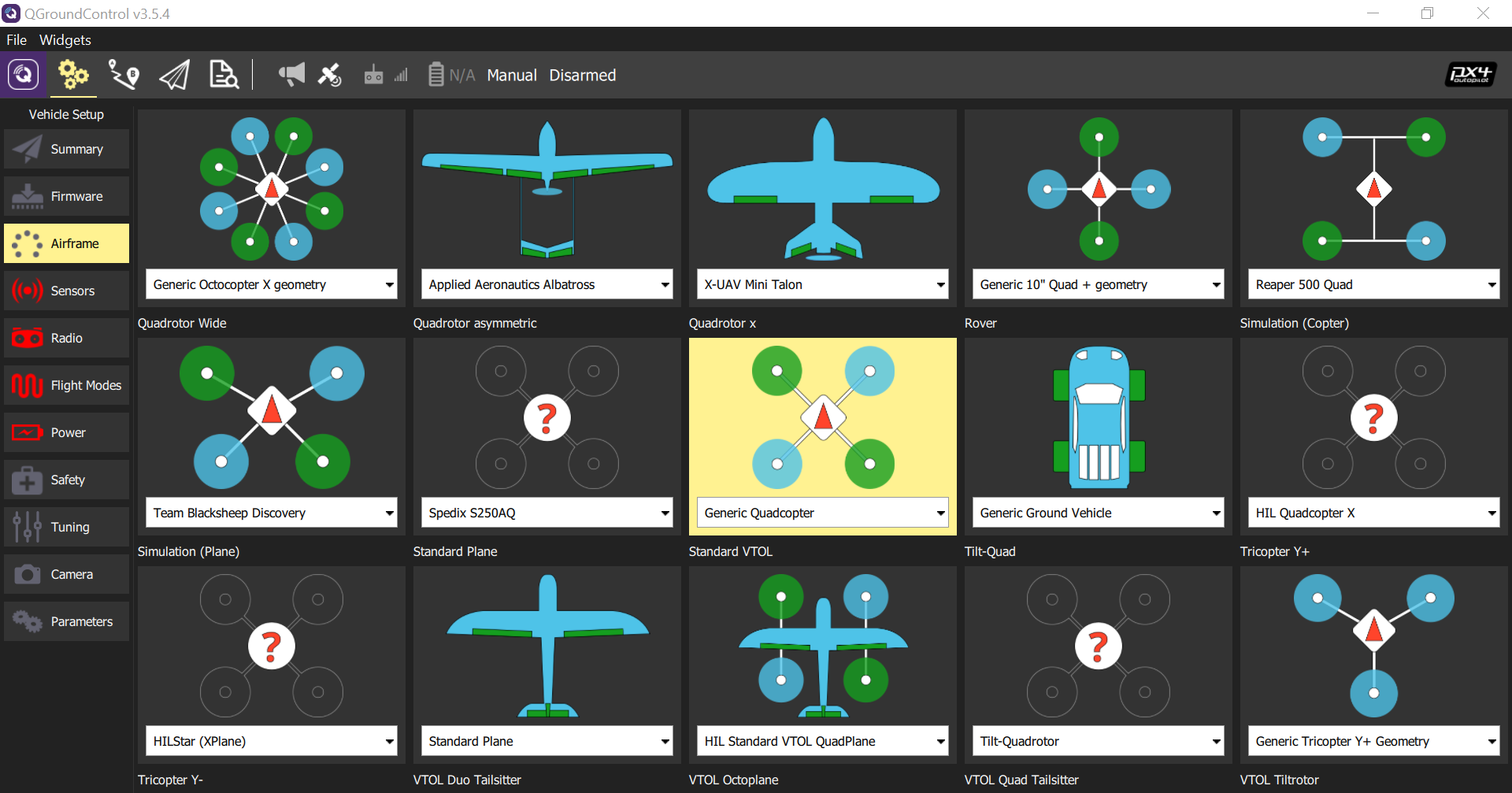
Caution
如果用户点击QGC界面右上角的Apply按钮,则无人机出厂设置会丢失,引发不必要的飞行问题,所以这一步设置是不推荐的。
传感器校准:
传感器可按照QGC中的提示进行校准:
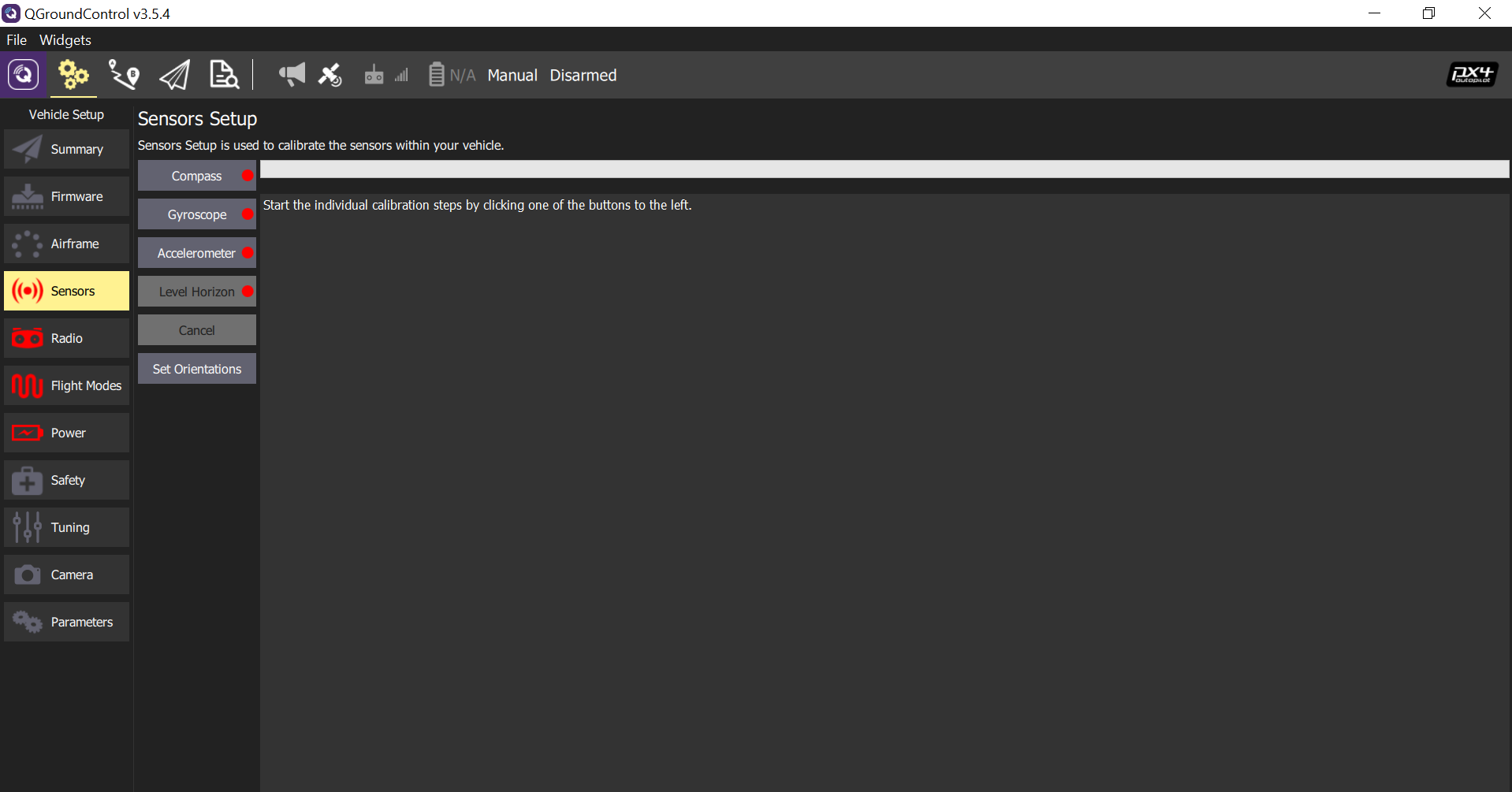
GPS模块内装有外置罗盘,建议用户在进行罗盘校准前先将GPS接入飞机,这样可以同时对板载、外置罗盘进行校准。 陀螺仪校准期间,任何微小的动作都会导致校准失败或引入无法接受的陀螺仪偏差,因此用户在校准时需使飞机保持绝对静止。 加速度计校准时,可将飞机置于平整桌面或竖直墙面,不建议手持进行校准。
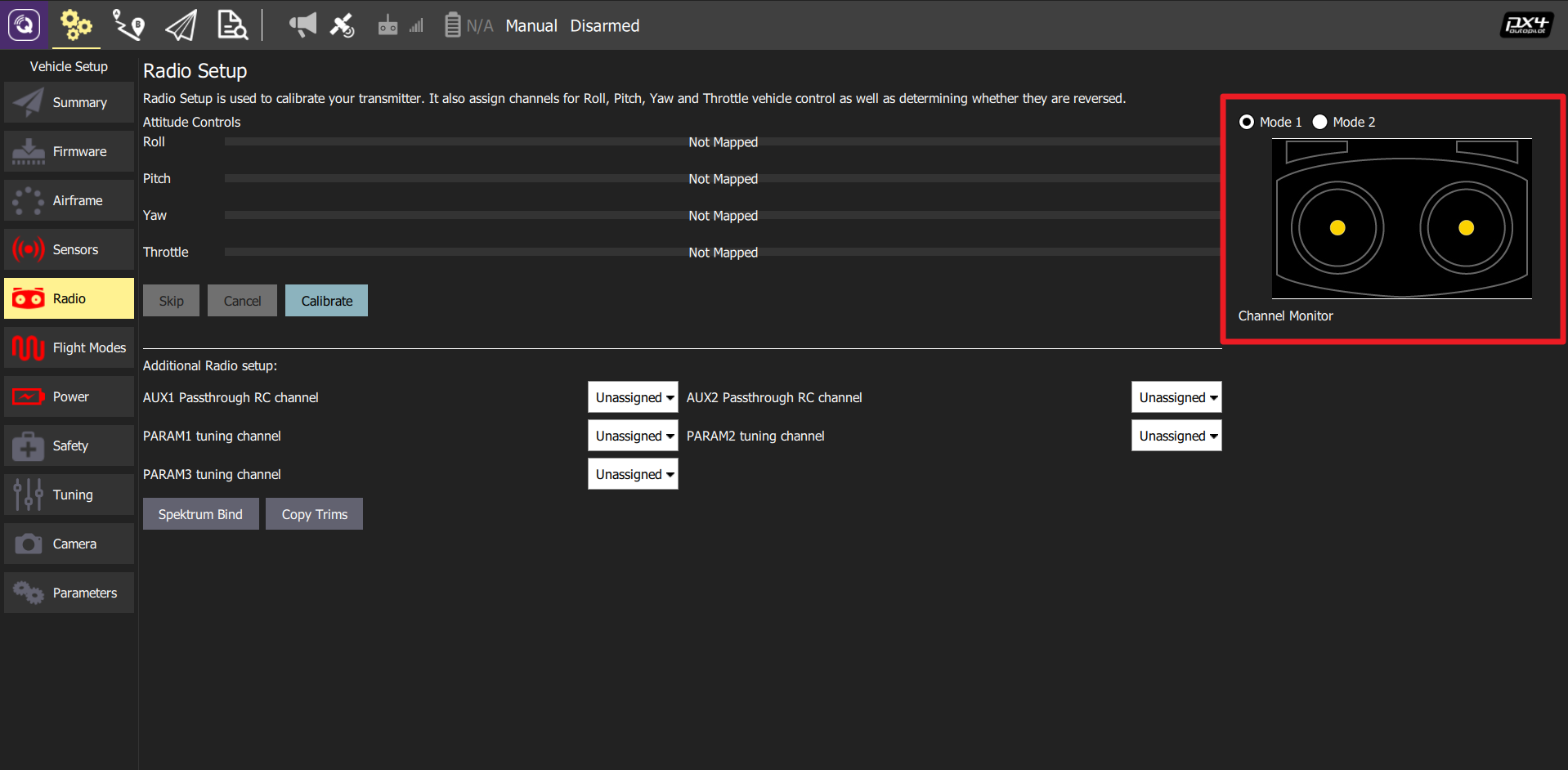
RC校准:
对于RC操作,我们可以选择右手模式(模式1,日本手)或左手模式(模式2,美国手)。点击“校准”按钮,用户可按照QGC指令轻松实现校准。
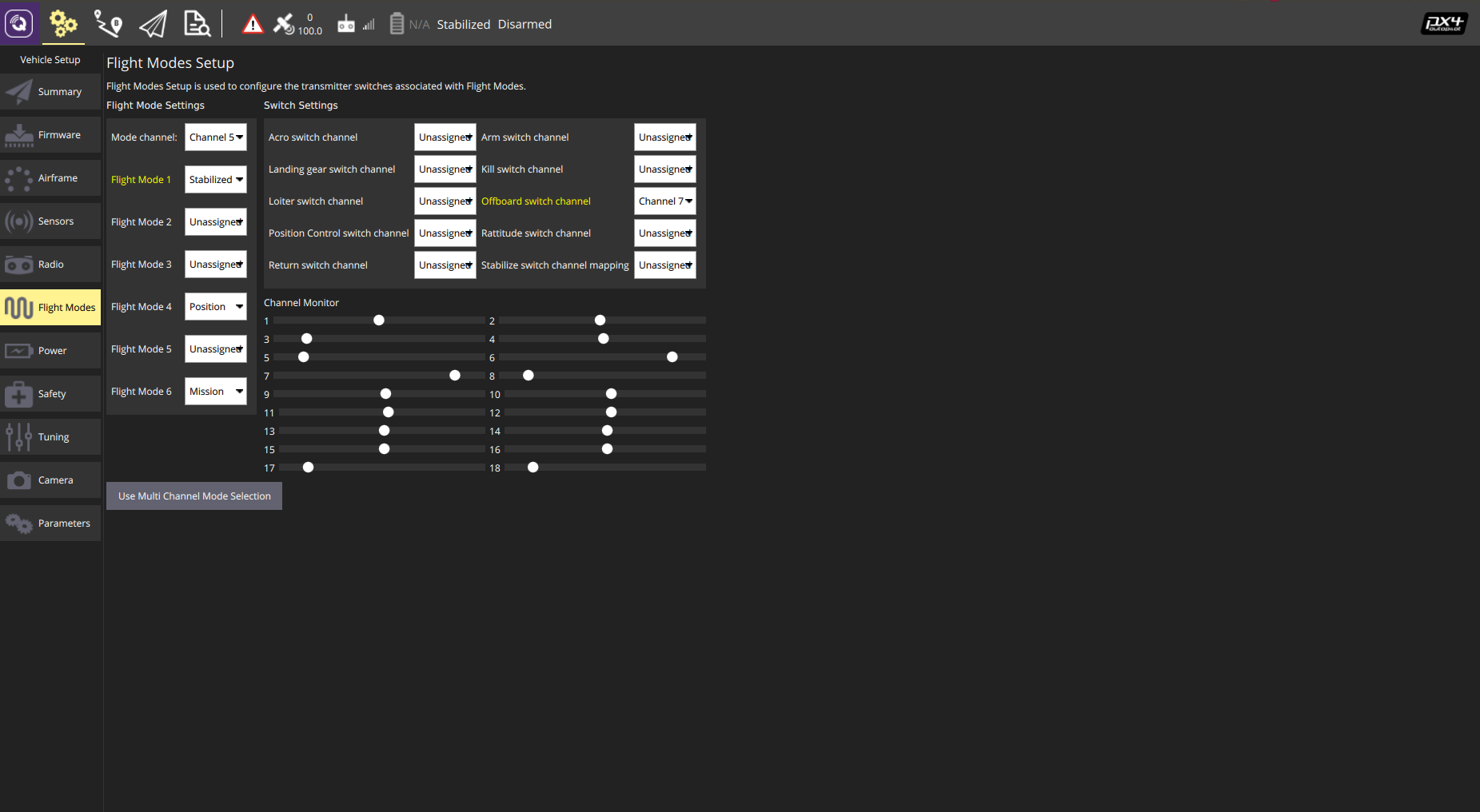
飞行模式设置:
用户应分配一个通道(如通道5)用于飞行模式设置,而分配另一个(如通道7)用于外部控制触发。 对于Kerloud UAV系列,建议用户至少设置 STABILIZED、POSITION、OFFBOARD三种模式。 STABILIZED、POSITION模式用于通过RC接收机实现手动飞行。这里需要强调: STABILIZED模式仅适用于经验丰富的飞手——该模式下摇杆输入信号映射到姿态基准,而POSITION模式下摇杆输入信号则映射到速度基准 。在OFFBOARD模式下,无人机接收机载计算机指令,完成如航点飞行、轨迹跟踪和视觉跟踪等自主任务。另外还有一种叫做MISSION的模式, 该模式下无人机将执行自主航点飞行任务,MISSION模式通常借助地面站进行操作。
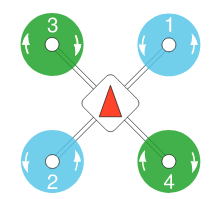
4. 桨叶安装
出于运输安全考虑,发货时桨叶未安装到机身。 我们需要按照下方四旋翼配置示意图正确安装桨叶,安装时需格外注意旋转方向,使用包装中提供的便携扳手可提高效率。
Caution
注意: 在进行校准操作和其他拿在手上的调试时,用户需要切记将桨叶拆除,以免发生危险!
5. Position模式飞行
Hint
此处步骤只适用于室外飞行的Kerloud无人机。对于光流或者视觉定位飞行的无人机款型,请参考对应的教程说明。
Position模式是用户实现无人机飞行的最简单方式,基本操作按顺序如下:
确保电池电量充足,电压需要至少高于4v每cell,对于4S电池,电压需要高于16v为宜;
将带有接口的电池可靠安装到飞机,确保飞行中不会脱落;
确保遥控器所有开关均处于初始位置,且油门降到最低;
电池接通上电;
将数传天线连接到电脑,并启动QGC地面站软件对无人机进行监测,有问题地面站会给出最明确的提示信息;
等待GPS锁星,通常如果GPS信号良好可在2-3分钟后听到提示音,且pixhawk主灯变绿;
同时拉低油门、右推偏航摇杆解锁无人机,解锁成功将听到一次长音提示,请注意遥控器美国手和日本手之间的通道差异;
使用之前指定的摇杆(如通道5)切换到position模式。如果模式切换成功,则地面站会提示进入position模式,否则会提示错误信息。模式切换失败的可能原因多是由于GPS信号质量不佳或者传感器校准问题。
慢速将油门推到中档以上,无人机将平稳起飞;
如果需要降落,可将油门慢速拉低;
无人机成功降落后,可同时拉低油门、左推偏航摇杆锁定无人机。