系统总览

Pursuit自动驾驶仪是一款集成度高、功能全面的导航套件,主要由以下几个核心组件构成:
自驾仪主体:作为系统的核心,集成了处理单元和传感器,负责执行自动驾驶任务。
数传天线:用于无线数据传输,确保自动驾驶仪和地面站之间的通信。
外部接口:提供了一系列接口选项,以便于与各种外部设备连接和协同工作。系统预留了以下接口:
RTK接口:自动驾驶仪集成了高精度RTK定位技术,用于RTK设备的连接
CAN接口:用于Pursuit自动驾驶仪与无人车VCU进行CAN通信,以控制无人车的位置、速度、角度等
DC12V电源接口:连接外部DC 12V电源,给自驾仪供电
ROS通信接口:该接口主要用于与上位机ROS(机器人操作系统)进行串口通信
DEBUG调试接口:用于开发和调试阶段,在地面站软件中执行软件调试、固件更新和参数配置等操作
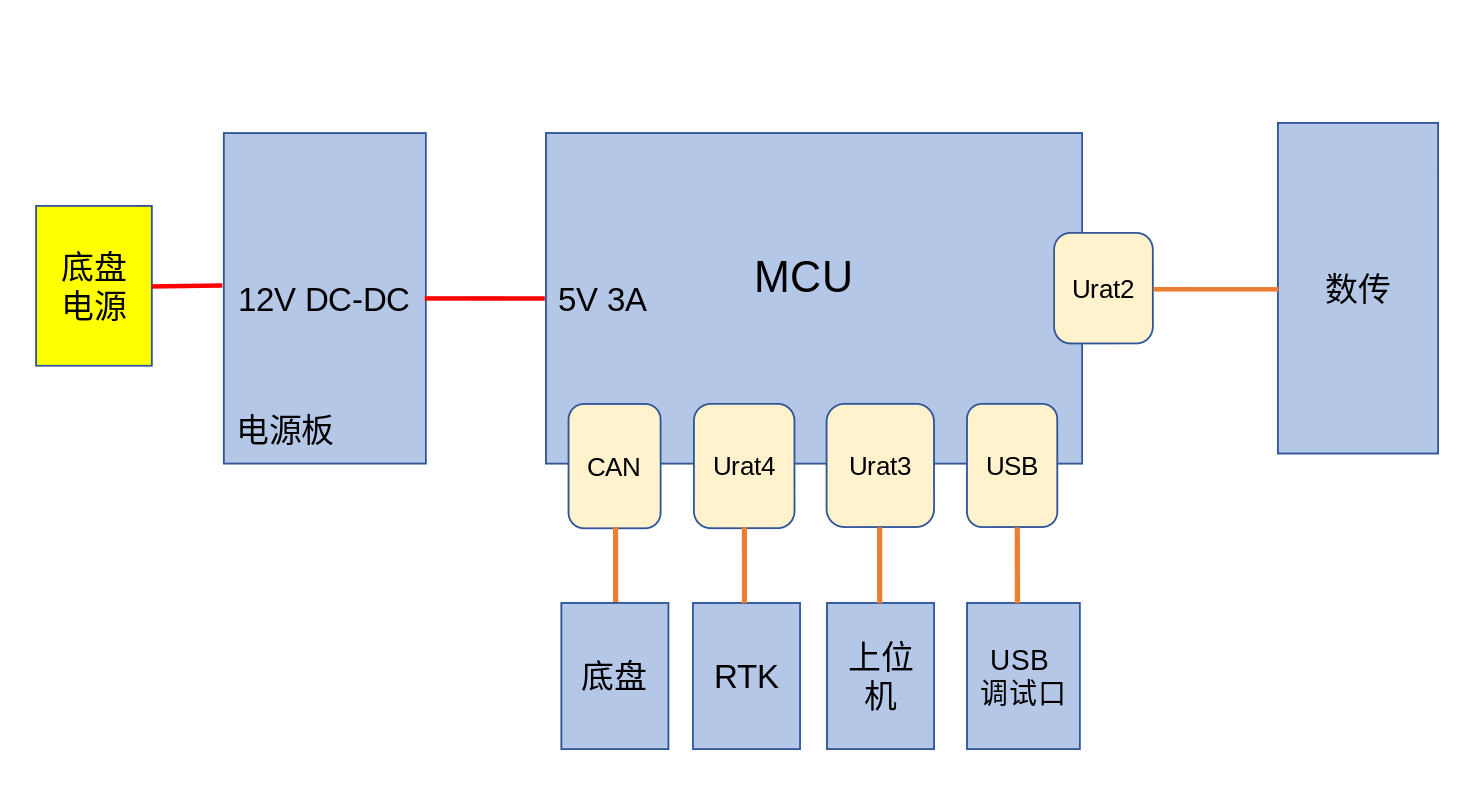
电气概述
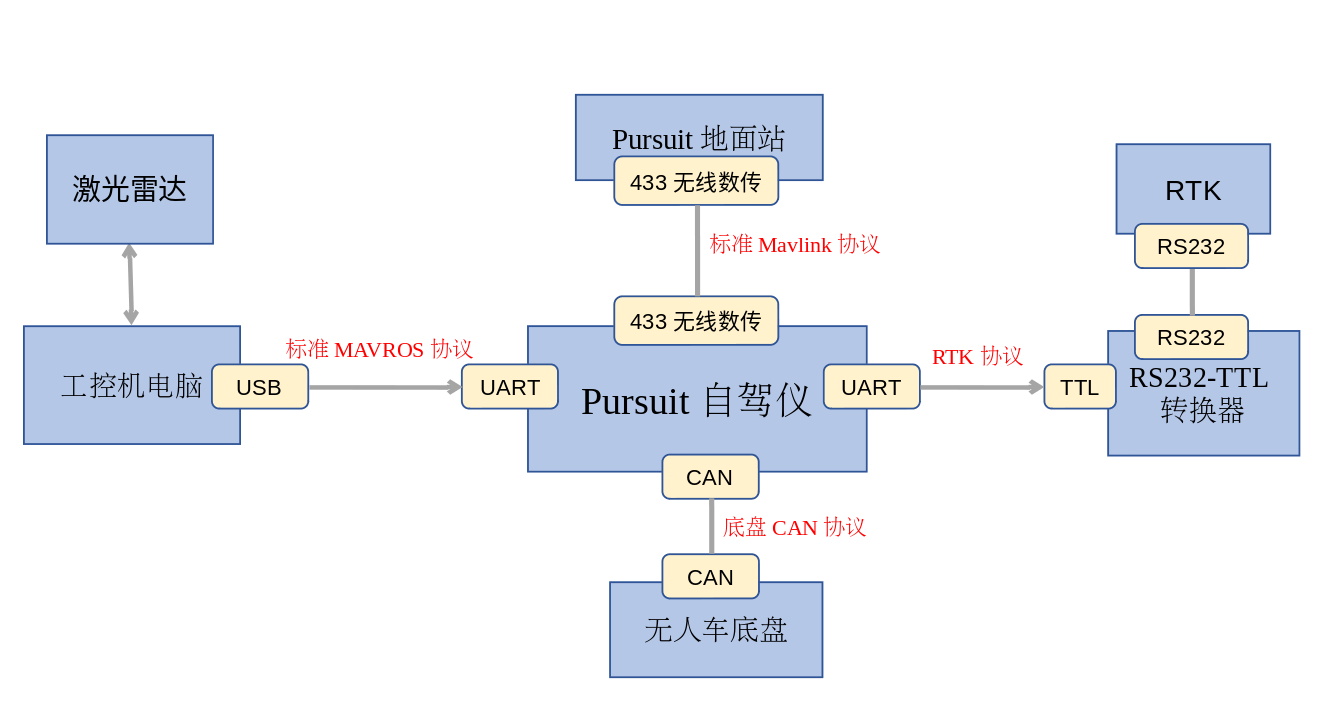
通信拓扑