快速启动
本节内容,涵盖实现快速启动所需的如下步骤:
机体设置
Stabilized模式下的手动驾驶
1. 机体设置
板载 Kerloud 自动驾驶仪烧录专有固件,参数在出厂阶段已经过实际测试调优。大多数情况下,用户不需要更改那些机载参数,如姿态和位置控制增益。
由于运输震动和地区差异,强烈建议用户对指南针、陀螺仪和加速度计传感器进行传感器校准,以避免意外行为。我们可以通过使用提供的Micro USB 线或数传装置轻松地将自动驾驶仪与运行Qgroundcontrol (QGC) 软件的计算机连接起来。 我们定制版的 QGC 软件可通过如下链接下载:https://github.com/cloudkernel-tech/qgroundcontrol/releases/download/v0.1/QGroundControl-flyingrover.AppImage。
实测良好运行的环境是 Ubuntu 18.04,运行提供的 QGC 映像需要以下命令:
sudo usermod -a -G dialout $USER
sudo apt-get remove modemmanager -y
sudo apt install gstreamer1.0-plugins-bad gstreamer1.0-libav gstreamer1.0-gl -y
# Then logout and login again to enable the change to user permissions.
chmod +x ./QGroundControl-flyingrover.AppImage
./QGroundControl-flyingrover.AppImage
1.1 机型设置
快速启动不需要此步骤,因为机身已在出厂阶段已配置。Kerloud Autocar 产品的默认机型为通用地面车辆,如下图所示:
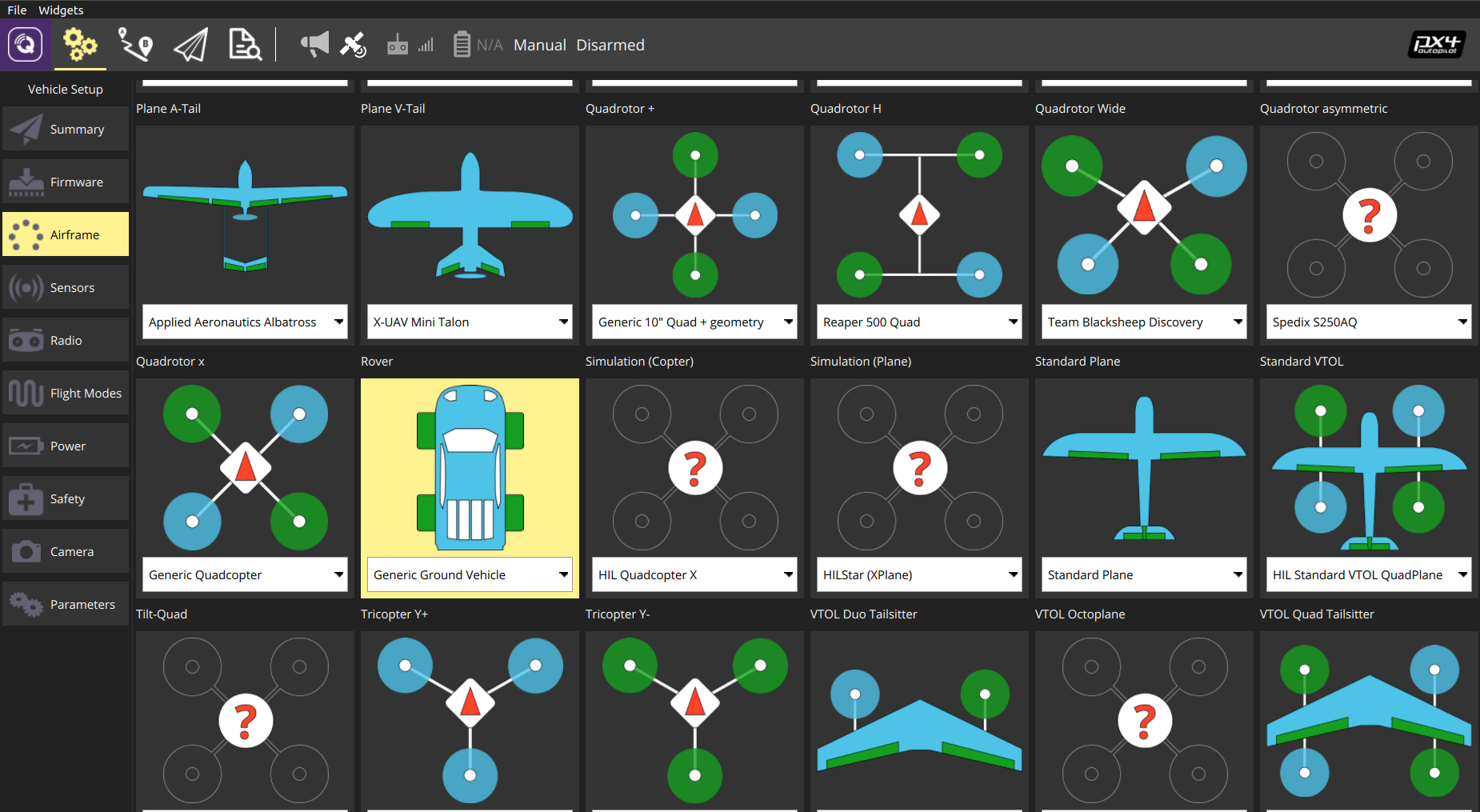
Caution
如果用户点击右上角的“应用”按钮,板载参数将重置为出厂版本。如果误按按钮,请咨询售后支持以恢复出厂设置。
1.2 传感器校准
可以按照 QGC 中的提示完成传感器校准:
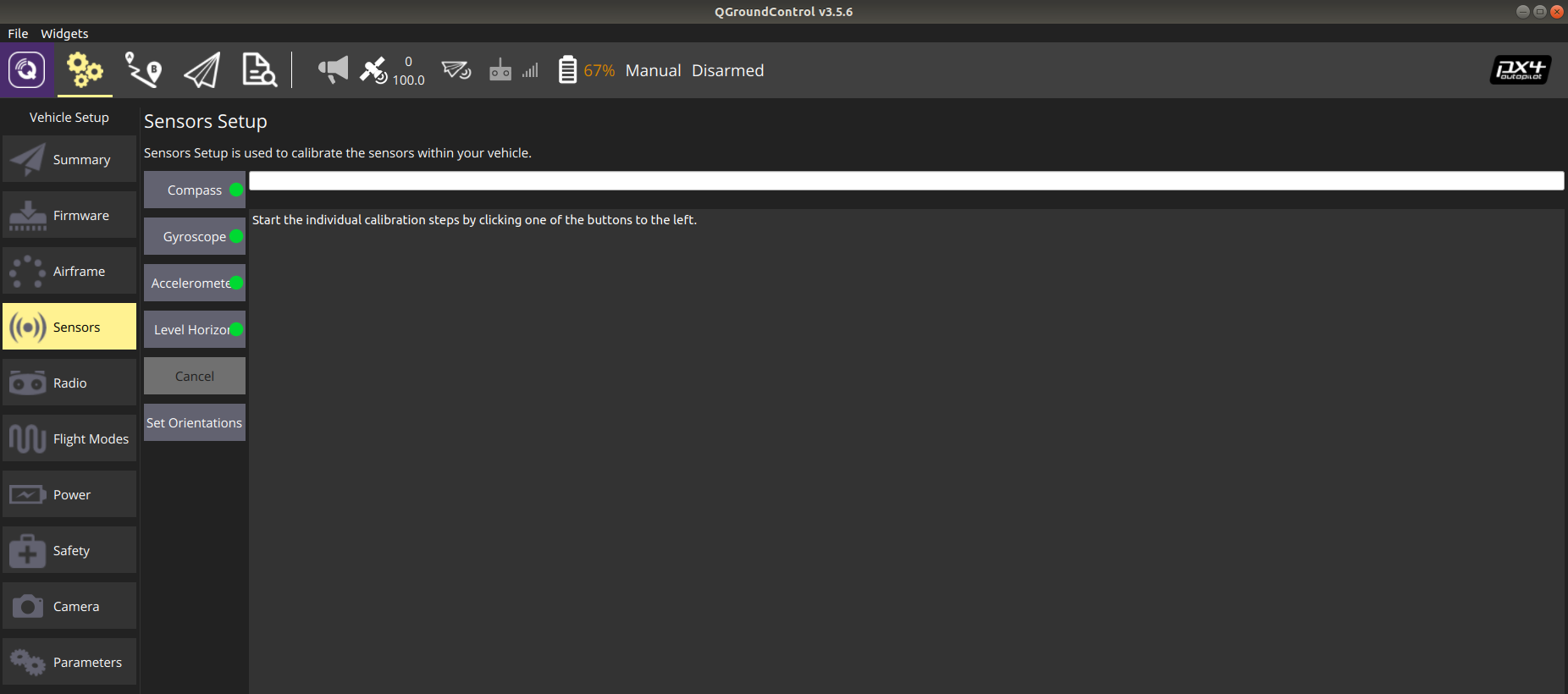
内置罗盘(ist8310磁力计)用于磁场测量,应在无强电磁干扰的环境中进行校准。对于陀螺仪校准,用户应保持自动驾驶仪绝对静止,因为即使是很小的运动也可能导致校准失败或导致不可接受的陀螺仪偏差。可将载具放置在平坦的桌面或垂直墙壁上以进行加速度计校准,不推荐手持校准。
1.3 RC校准和设置
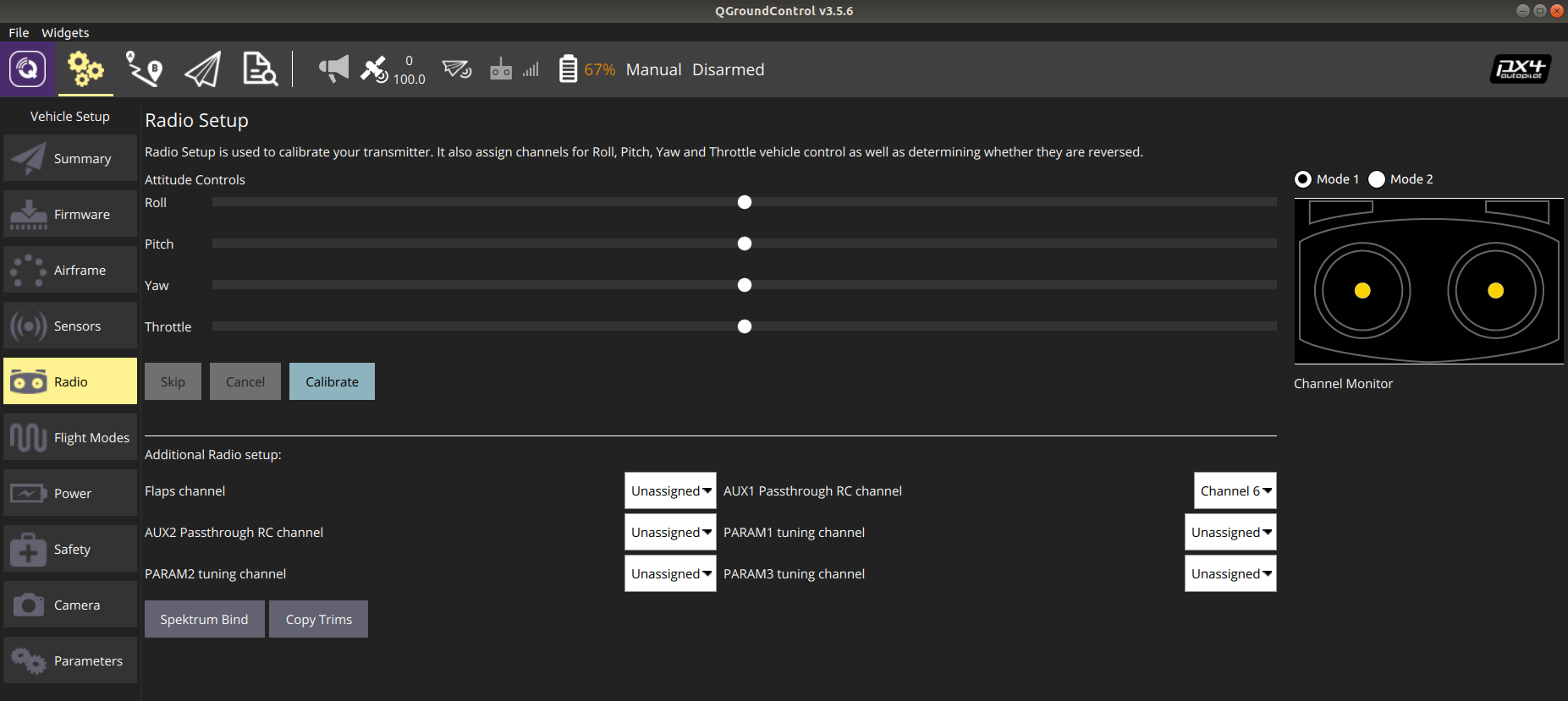
我们可以选择右手模式(模式 1,日本手)或左手模式(模式 2,美国手)进行 RC 校准。通过点击 Calibrate 按钮,用户可以按照 QGC 提示轻松完成 RC 校准。此外,我们还需要为 AUX1 分配一个通道(例如通道 6)来控制前进、后退状态切换。
1.4 模式设置
用户应分配一个通道(例如通道 5)用于模式设置,另一个通道(例如通道 7)用于offboard 控制触发。建议用户为 Kerloud Autocar 设置 STABILIZED、Mission 和 OFFBOARD 模式。
稳定模式用于通过 RC 发射器进行手动控制。要强调的是,偏航和油门杆输入直接输入到相应的执行器。在OFFBOARD模式下,无人车由车载电脑指挥,实现航点导航、轨迹跟踪、视觉跟踪等自主任务。另一种模式称为MISSION模式,无人车将执行自主航点行进任务。通常 MISSION 模式是通过地面控制站界面操作的。
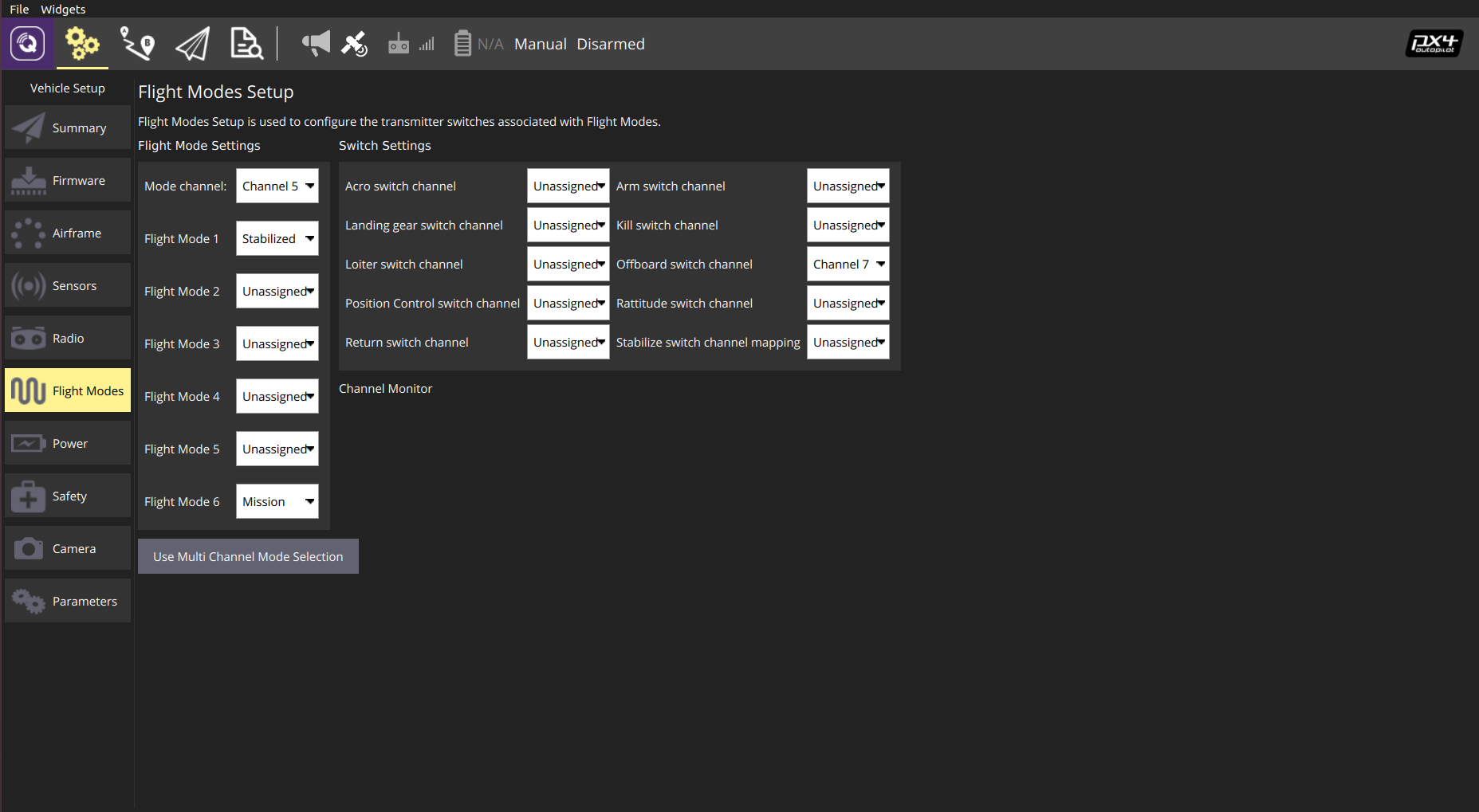
为简洁起见,用户可以在下图中查看 RC 发射器的开关设置:

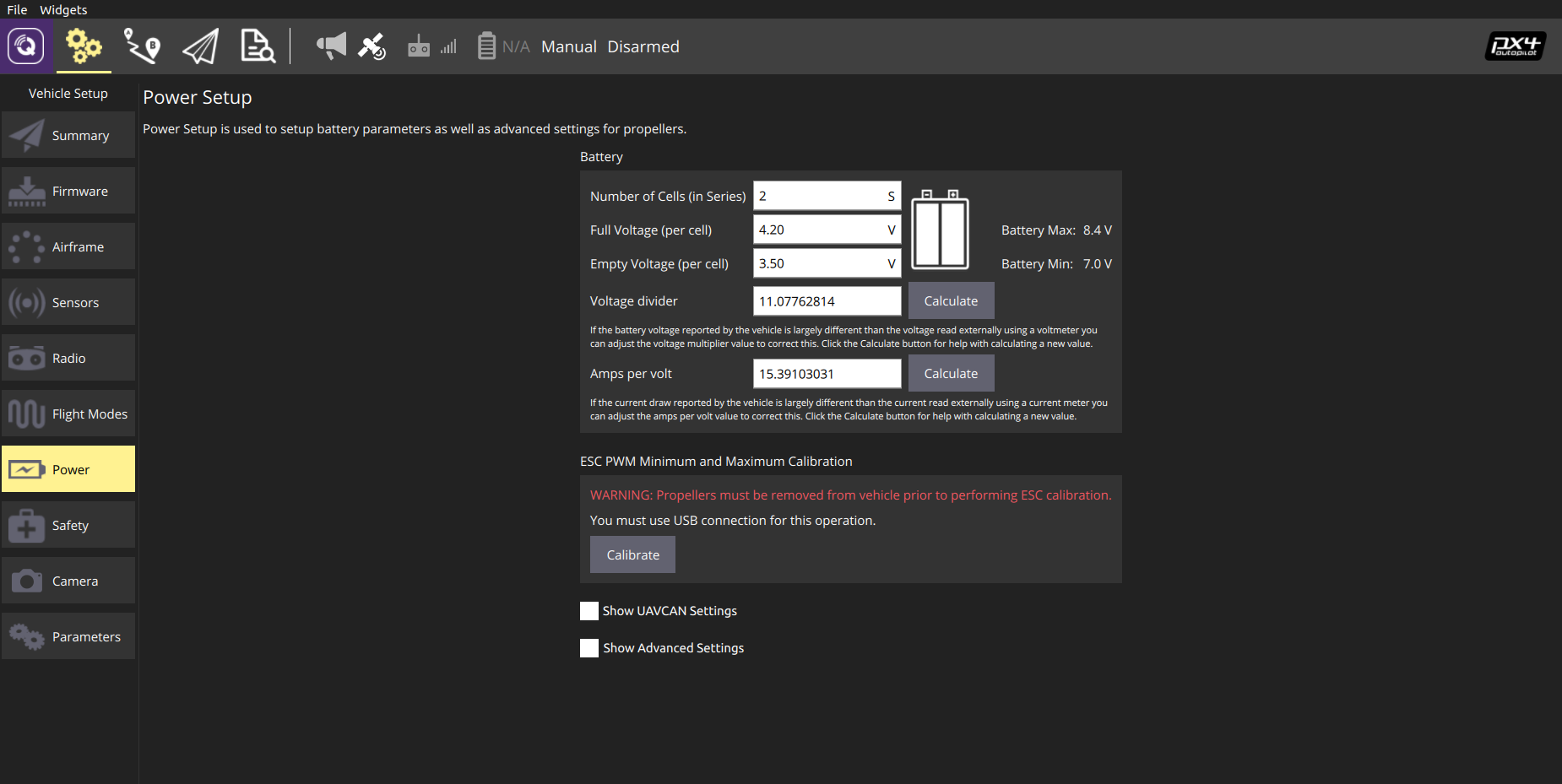
1.5 电源校准
Autocar平台的电源是2S Lipo电池,只有分压器需要校准用于板载感应。用户可以在平台上电后使用万用表测量电池电压,点击分压器的“校准”按钮后输入测量值。
1.2 stabilized模式下手动驾驶
在车模式下进行手动驾驶的操作流程如下:
确保电池电压高于 7V,并装好电池。
确保所有开关都处于初始位置并且油门通道处于低位。
平台上电,然后打开发射机。车辆应在 STABILIZED 模式下启动,可在 QGC 软件中查看。
通过拉低油门并右推偏航杆来解锁平台,然后我们会听到机器发出一声长长的哔哔声。如果解锁命令被拒绝,我们需要将平台与 QGC 软件无线连接以查看警告消息。
将 AUX1 摇杆(默认为 6 通道)拨至前进位置,推动油门并用偏航摇杆转向,即可手动操作车体。将AUX1摇杆切换到另一个位置可实现倒车。
通过拉低油门并左推偏航杆 5 秒,可锁定车体。