软件在环仿真
注意:本教程适用于所有Kerloud VTOL产品
我们为客户提供软件在环 (SITL)仿真环境,以便在实际飞行前验证其机载应用软件。
由于环境依赖性,SITL仿真软件只能在装有Ubuntu 18.04的Intel 64位处理器电脑上运行,而不可在机载PC上运行。最低硬件要求位:Intel i7处理器和8GB内存。
前提环境要求
所需环境为Ubuntu 18.04,带有ROS melodic和Gazebo 9引擎,并配备PX4开发所需的工具链。 用户可参考链接 http://cloudkernel-tech.gitee.io/kerloud_mini/en/ADVANCEDDEV.html 中的说明,并利用便捷脚本进行快速设置,设置命令为:
cd Tools/setup/custom
bash ubuntu.sh
bash ubuntu_sim_ros_melodic.sh
受邀客户将加入我们在https://gitee.com/cloudkernel-tech/sitl_space_vtol中维护的软件库SITL-space。软件库会定期升级,请保持更新。
如何使用
只需运行以下命令即可启动SITL仿真:
cd <sitl-space directory> \
&& bash sitl_run.sh $PWD/bin/px4 none gazebo standard_vtol
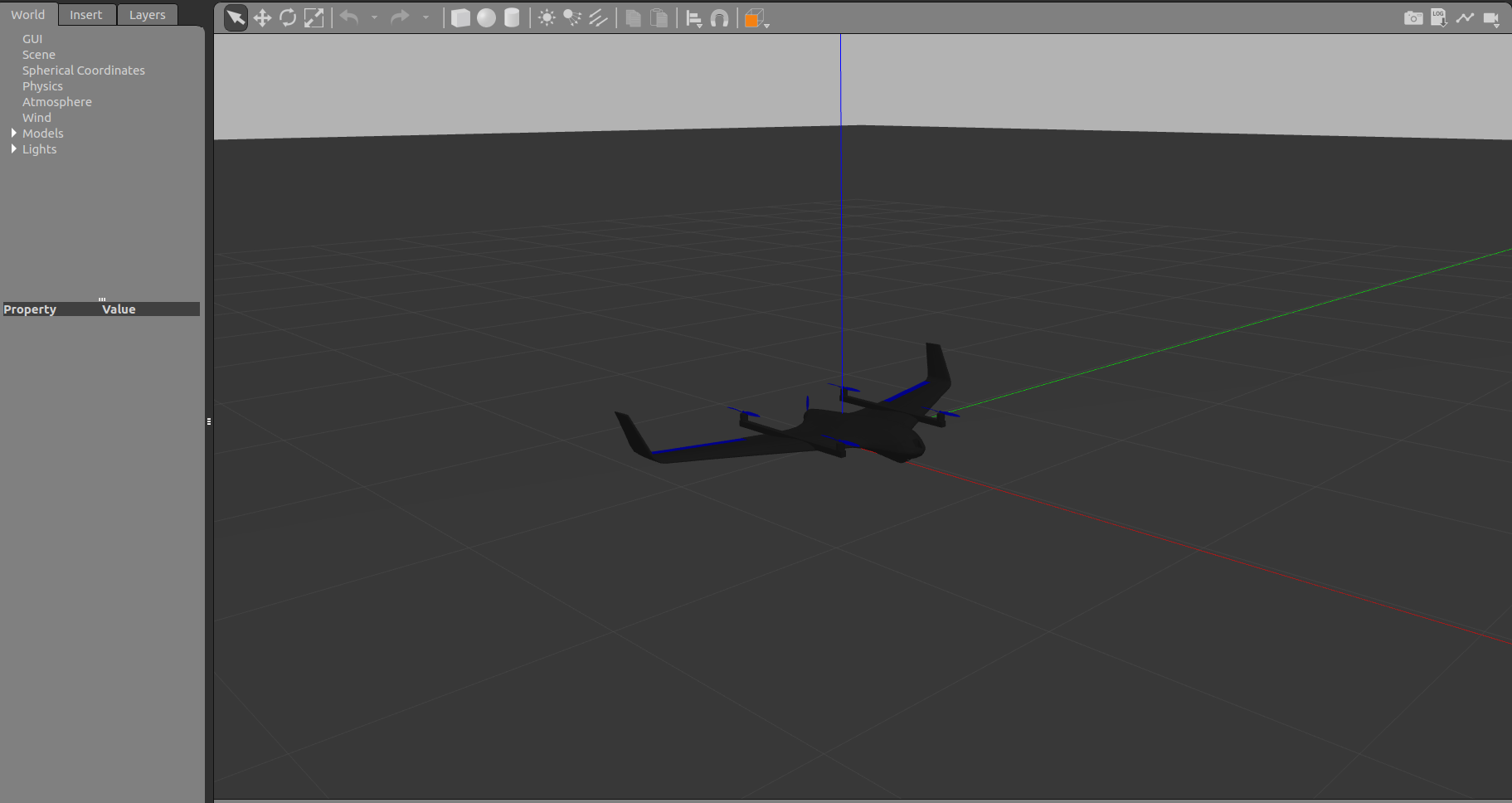
如您所期待的,gazebo 9中将显示一台虚拟的VTOL:
然后用户就可以运行Qgroundcontrol和他们自定义的ROS节点来进行应用程序开发。