Powering and Programming Interfaces
Note: This tutorial is applicable for Kerloud Astro and Bee models.
1. Interface Description
Kerloud Astro
The development interface for the Kerloud Astro is given below. The power switch is used to switch on or off the vehicle in normal operation. USB ports are from the onboard Nvidia Jetson Nano computer so users can plug in a keyboard and a mouse for programming. With the charging port, users can charge the onboard battery simply by connecting with the supplied power adaptor.

Warning
The power source of the Kerloud Astro is 3S Lipo battery with 4800mAh, and overdischarge of the 3S battery to voltage under 10v or lower can lead to permanent damage.
Kerloud Bee
The onboard Raspberry Pi can be powered by either the battery or the provided power adaptor. We highly recommend users to use the power adaptor as the power source for programming, so as to avoid overdischarge of the battery. The power and HDMI ports are shown in the figure below.
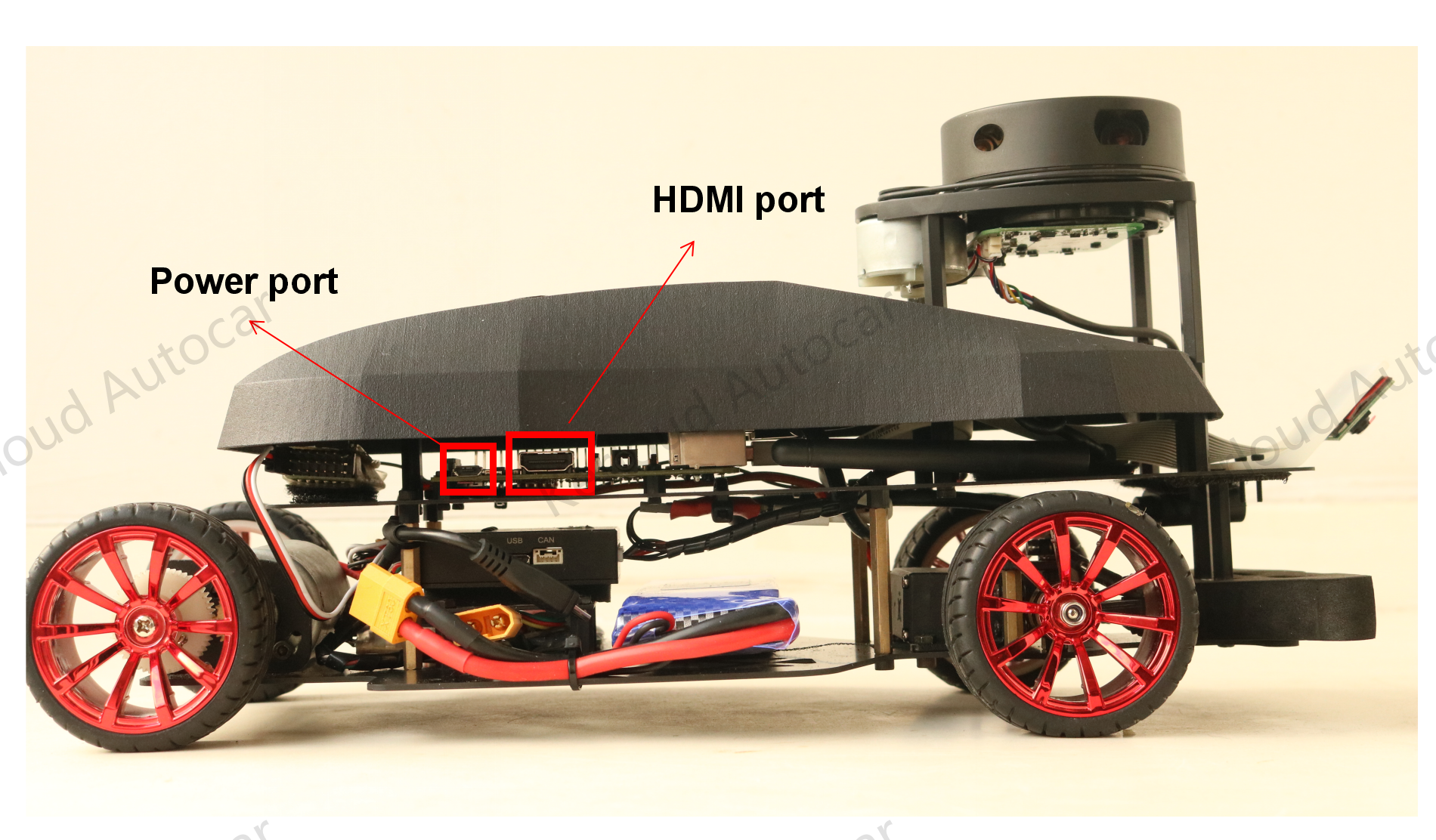
Warning
The power source of the Kerloud Bee is 2S Lipo battery, and overdischarge of the 2S battery to voltage under 7v or lower can lead to permanent damage.
2. Access the Onboard Computer
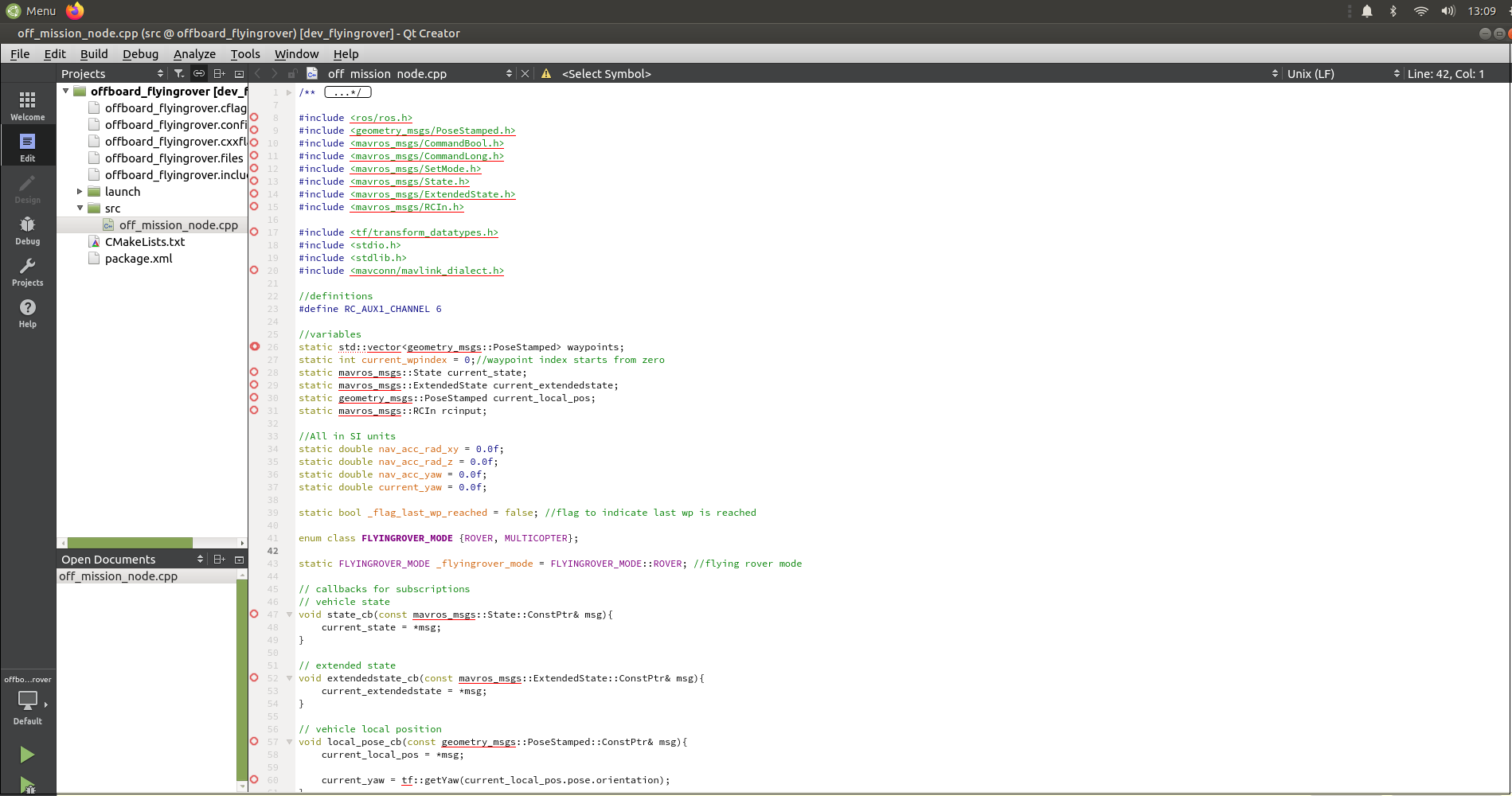
By connecting the onboard computer (Raspberry Pi or Nvidia Jetson Nano) with a computer screen via a HDMI cable, we can log into the onboard computer. We advise users to use screens with native HDMI ports as those with a VGA port cannot work even with a VGA-HDMI adaptor. The default user name and password are both ubuntu. We installed the QTcreator as the default IDE for software programming. To launch the Qtcreator interface, just enter qtcreator in a terminal.
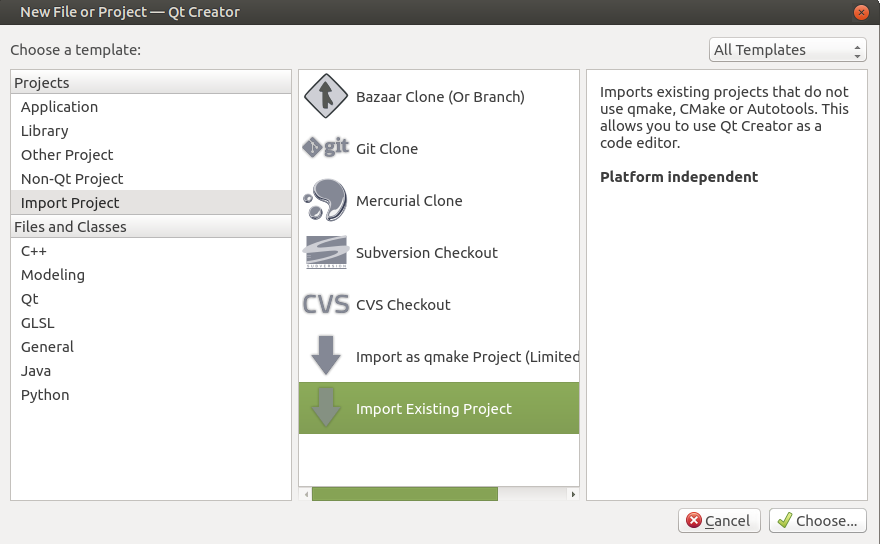
To create a new qt project for a ROS package, users can import existing source code as shown below:
Users can also log into the computer remotely. To achieve this, both the onboard computer and a remote PC have to be in the same local wifi network. Assuming that the IP address for the onboard computer is 192.168.0.101, then we can log into it with commands:
sudo apt update
sudo apt install openssh-server
ssh ubuntu@192.168.0.101