System Overview
System Configurations
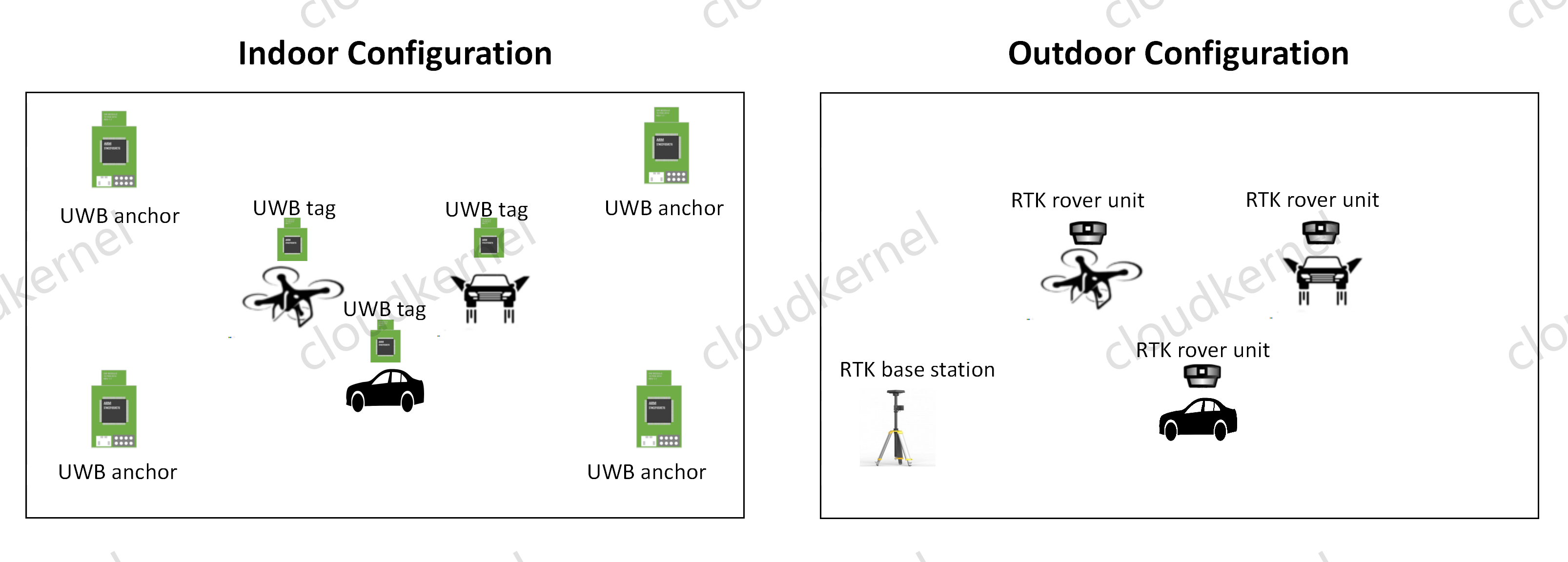
The DASA platform has two configurations. The indoor configuration utilizes UWB (Ultra-Wideband) positioning for vehicle localization. The horizontal positioning accuracy can reach 5cm with low level sensor fusion, and the vertical accuracy is 1cm with a laser range finder. Vision cameras and laser sensors can also be integrated for enhanced perception in obstacle avoidance and SLAM (Simultaneous Location And Mapping). The indoor configuration can support up to 40 vehicles simultaneously. We recommend the minimal field dimension be 5m*5m, and the vehicle number in use depends on both field dimension and safety margin in agent neighbourhood.
The outdoor configuration employs RTK (Real-time kinematic) GPS signals for global localization, and it can support unlimited number of vehicles theoretically. We recommend the minimal field dimension be 20m*20m, and the outdoor environment should be spacious so vehicles can obtain centimeter positioning accuracy via RTK.
Vehicle Types
The DASA platform currently only supports the Kerloud robot family as below, and we plan to add more robots from communities in the future. Please refer to corresponding websites for details.

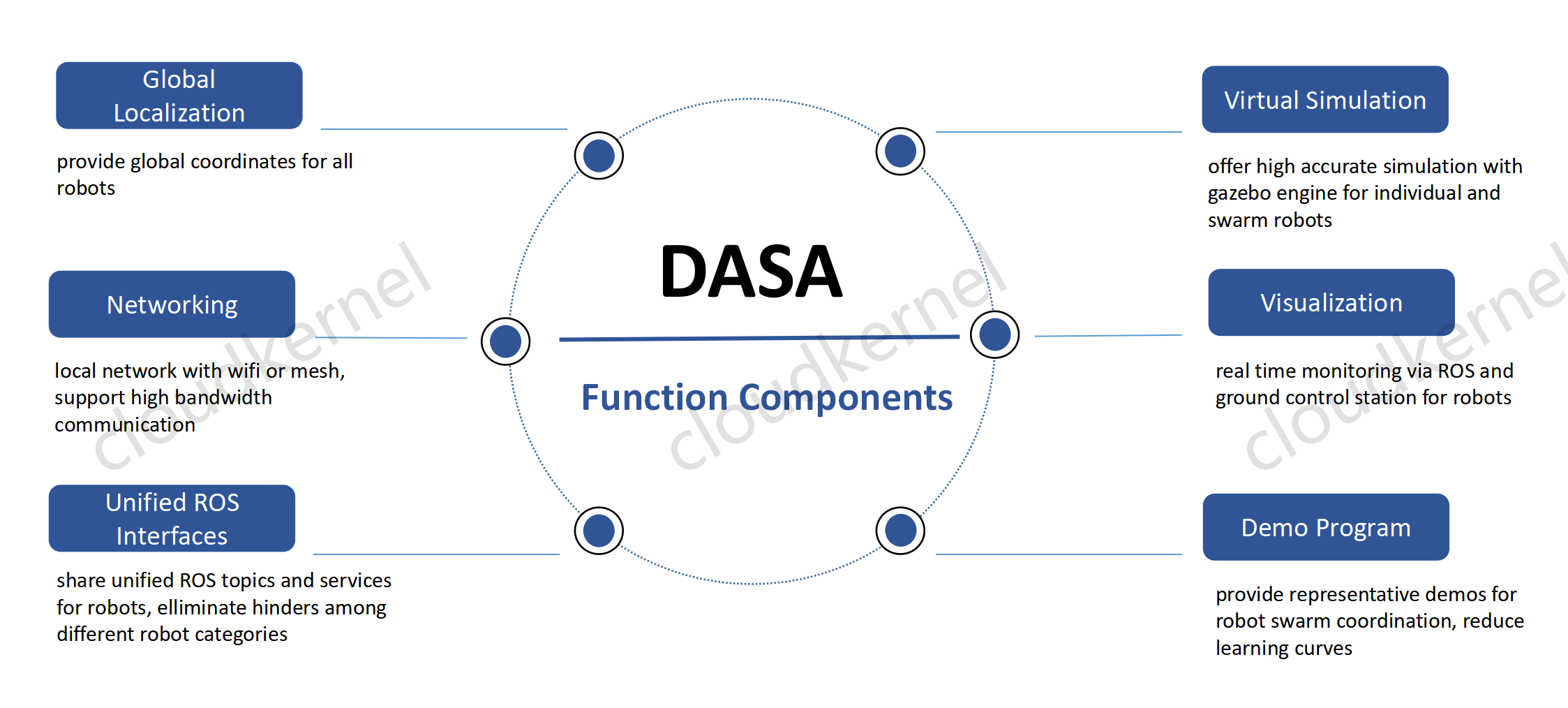
Main Functions
The DASA system consists of several main functions as depicted below.