Mission Management via Qgroundcontrol Software
Note: This tutorial is applicable for all Kerloud flying rover products
We provide users with customized Qgroundcontrol software, which makes it easy to manage waypoint missions for flying rovers. The Qgroundcontrol software can be downloaded from the link, and the basic setup procedures are illustrated in the quick-start section.
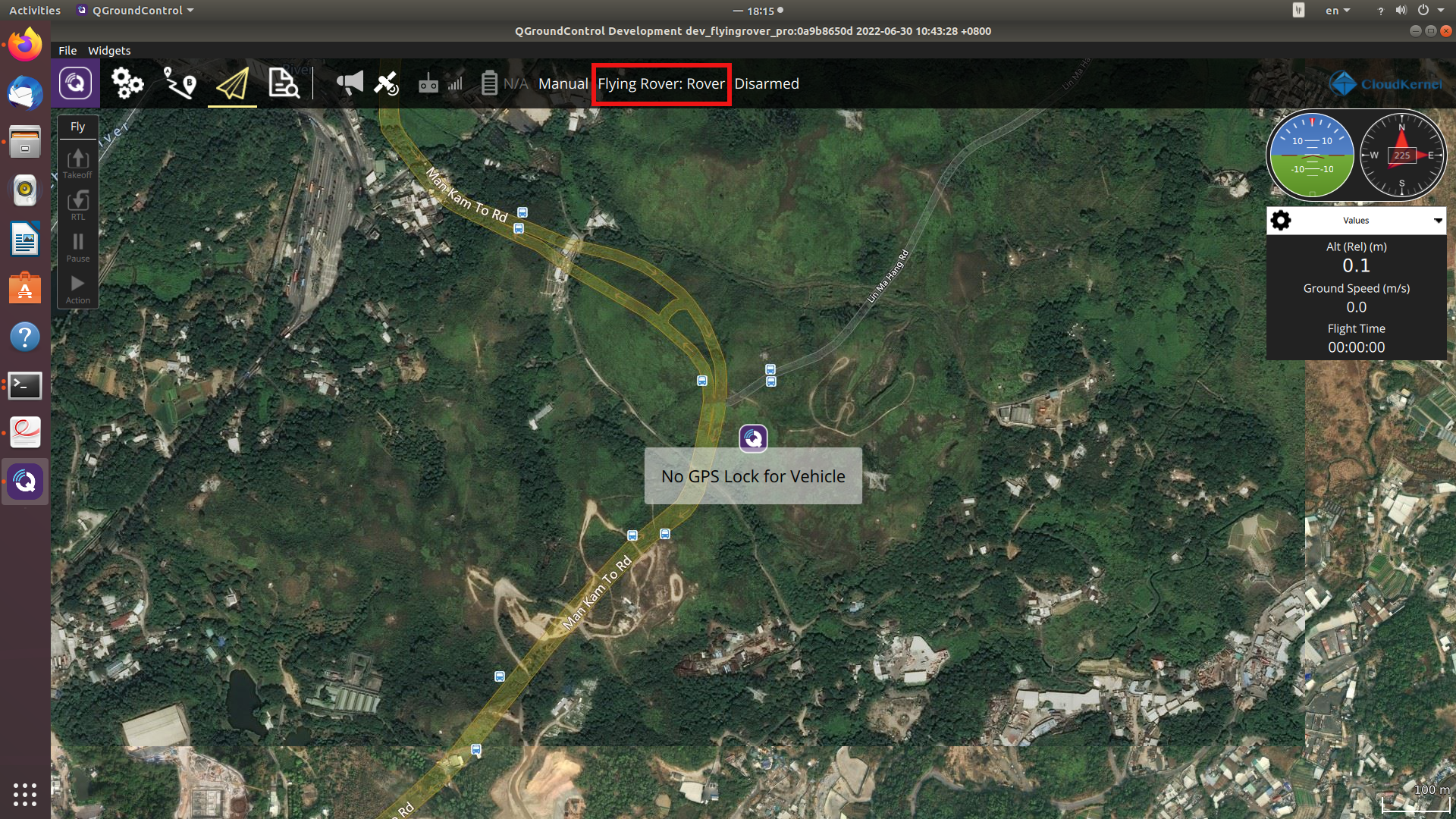
1. Vehicle State Display
The vehicle state depicts the operating mode of flying rovers, and it’s displayed under the MISSION section of Qgroundcontrol station, as shown in the figure below. “Flying Rover: Rover” indicates that the flying rover is operating in the rover mode, while “Flying Rover: Multi-Rotor” means the vehicle is in the multicopter mode. Users can also trigger the transition between dual modes by clicking the icon.
2. Mission Item Types
We also provide several mission item types specifically for flying rovers. By clicking the waypoint icon generated from the planning section, users can specify the mission item type for the vehicle, which is under the Flying Rover category.
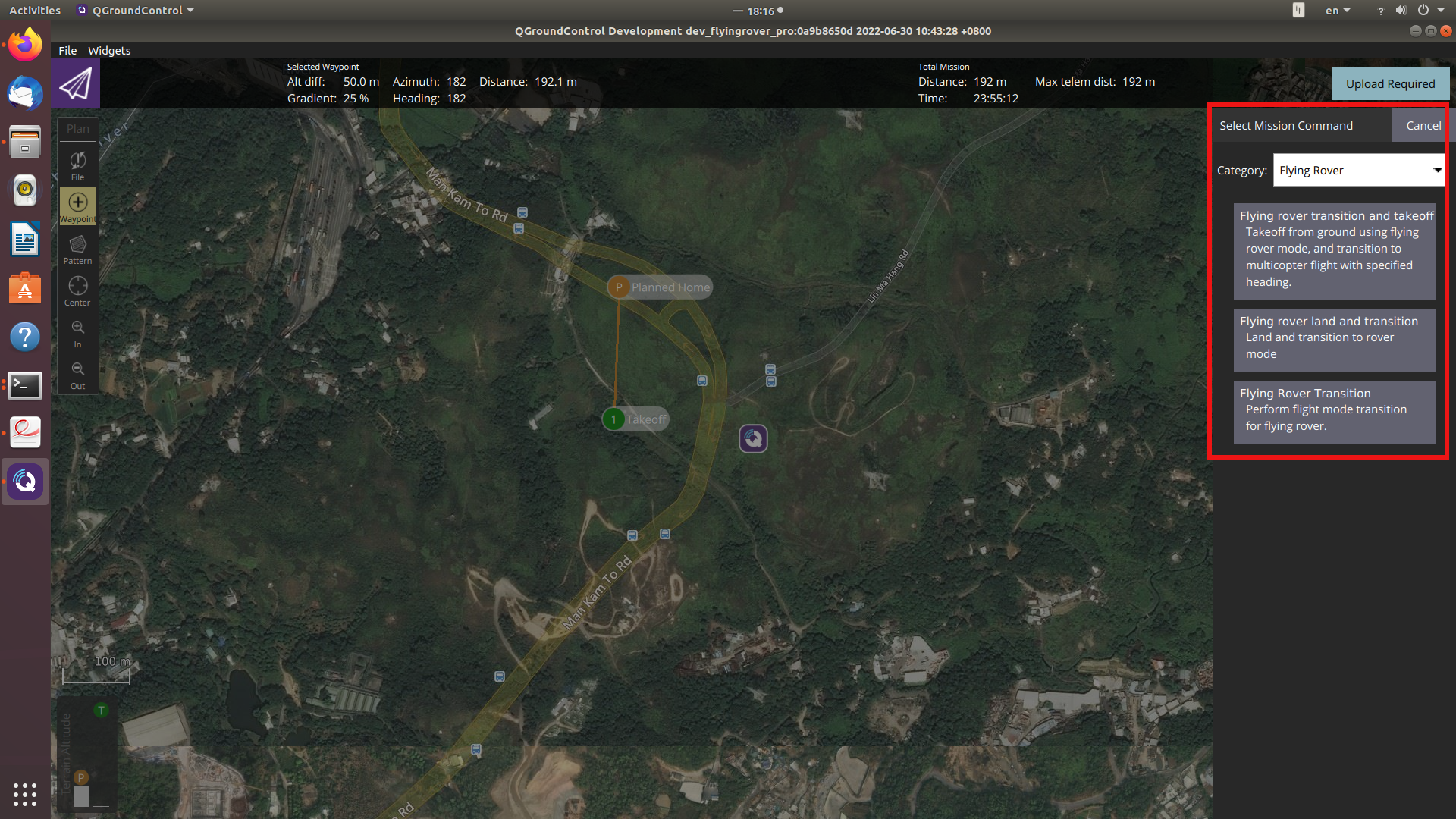
These commands are illustrated as:
Flying rover transition and takeoff: the vehicle will first transit to the multicopter mode, and then takeoff.
Flying rover land and transition: the vehicle will land and transit to the rover mode after landing.
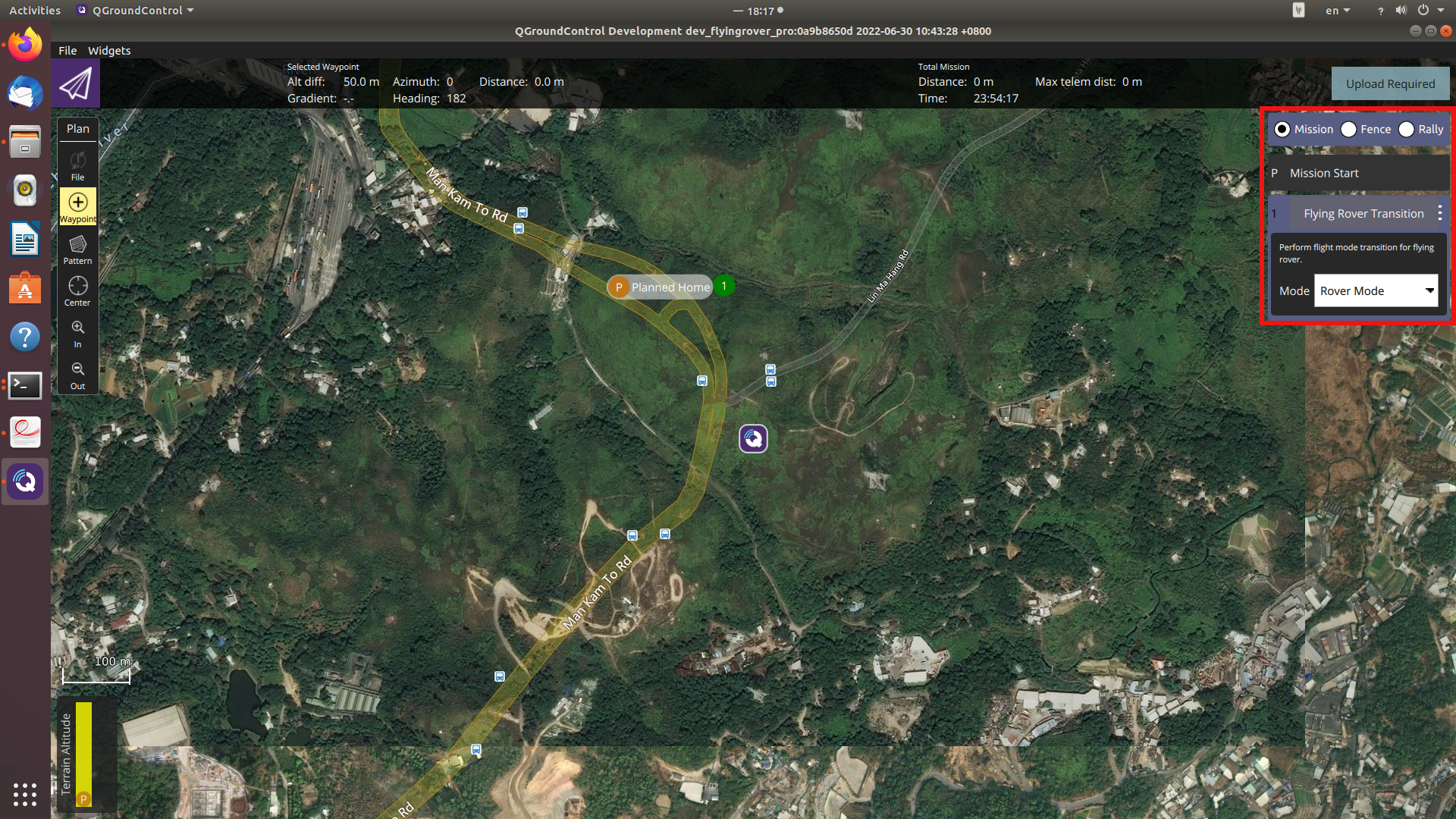
Flying rover transition: the vehicle will transit to the specified operating mode.
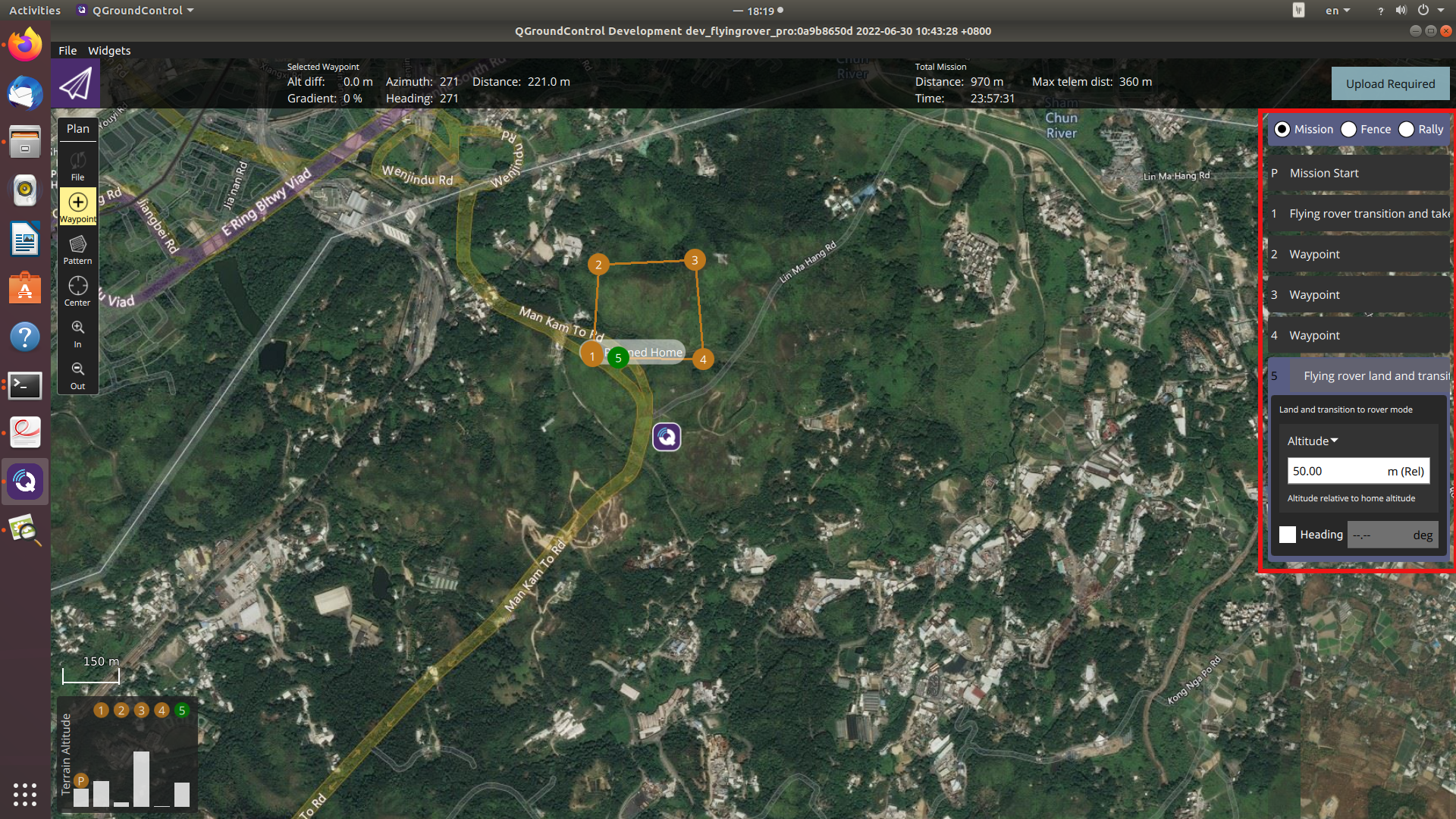
3. Mission Example
A typical waypoint mission for flying rovers is presented in the figure below. The vehicle is requested to transit to the multicopter mode first, and then takeoff and fly through several waypoints. Finally, it will land and transit to the rover mode. The waypoint planning for the rover mode can be conducted in the same fashion, in which the altitude parameter will be automatically neglected by the autopilot.