DASA Swarm Simulation Toolbox

UAV swarm has been an intensified topic in recent years due to its superiority as a form of collective intelligence. Although a UAV can achieve various capabilities up to now in perception, sensing, localization, mapping and aggressive maneuvers, the possibility is still quite lacking in making a single machine omnipotential for industrial applications such as tasks requiring different payloads and autonomous cooperations. The development of UAV swarm can be hindered simultaneously in theory and engineering aspects. The system architecture is complicated by enormous factors, such as software and hardware integration, communication limitation, obstacle avoidance, inter-robot collision avoidance, swarm coordination, local agent behavior planning, and distributed decision making.
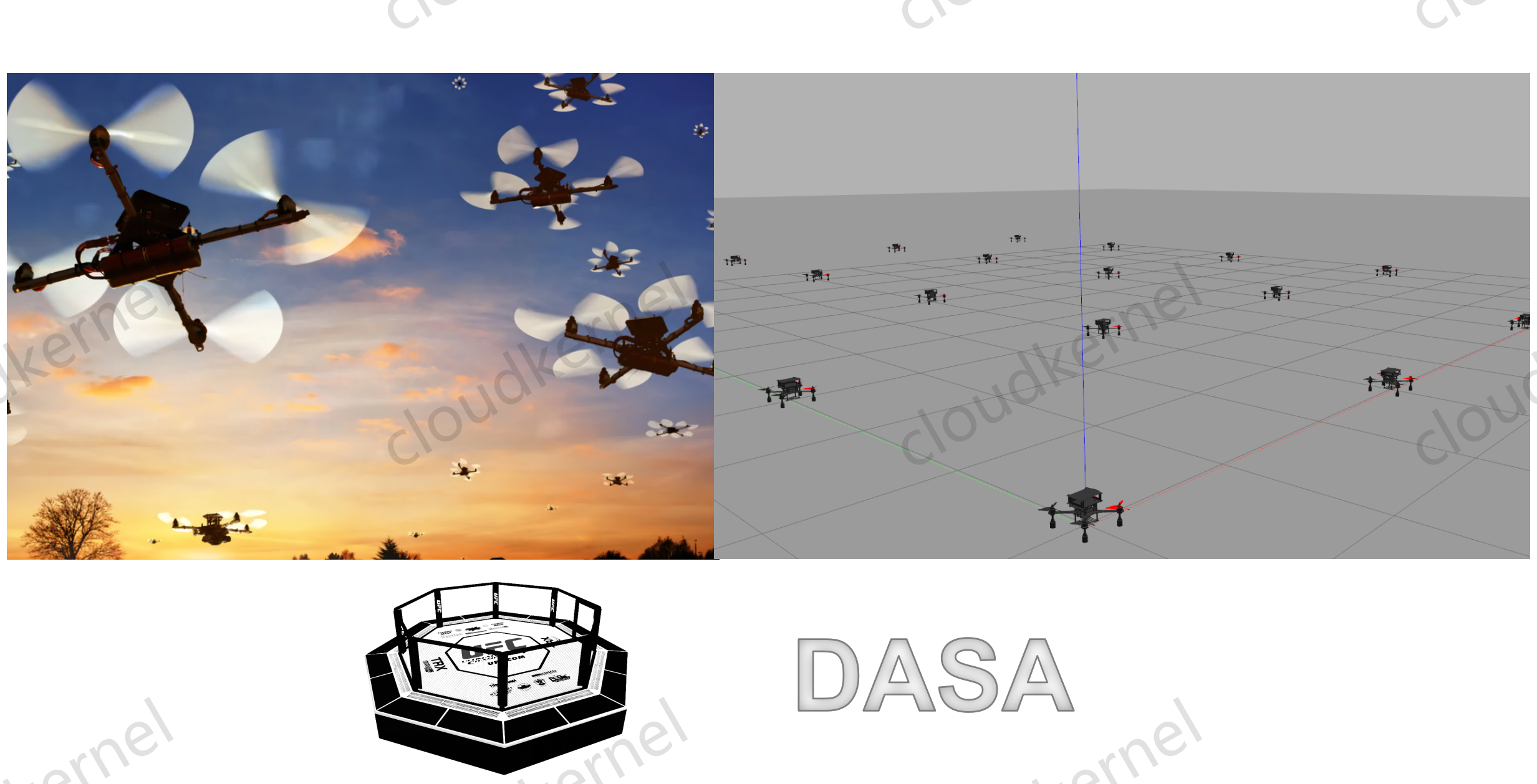
DASA (Dynamic Autonomous System Arena) is a platform proposed by Cloudkernel Technologies to encompass heterogeneous robots not limited to UAV, UGV (Unmanned Ground Vehicle), UFR (Unmanned Flying Rover). We present here the DASA swarm simulation toolbox to facilitate the need to setup a realistic simulation environment for UAV swarm in a single or a cluster of computers. The platform is validated to support up to 50 UAVs in a single personal computer depending on the hardware performance, and unlimited UAVs in computer clusters. Users can simply launch simulation nodes with several scripts, and validate their algorithms in the ROS architecture. The distributed nature of the simulation toolbox enables users to deploy their algorithms to real machines with minimum efforts.
Note
📌 Kerloud UAV series are seamlessly compatible with the swarm simulation toolbox. Verified code in the simulation environment can be directly integrated into those machines.
Features
The features of DASA swarm simulation toolbox are as follows:
Support up to 50 uavs in a single PC, and unlimited number in computer clusters.
Visualization with high accurate gazebo 9 physics engine.
Fully ROS compatible, easy to deploy.
Decentralized and centralized swarm control schemes can be both realized.
Optional demo code contains decentralized formation control, inter-robot collision avoidance, and mission management functionalities.
What We Offer
We offer several options for the simulation toolbox, as shown in the table below.
Entry |
Standard |
Professional |
Ultimate |
|
|---|---|---|---|---|
Supported UAV number |
5 |
20 |
50 |
1000+ |
Open source demo code |
No |
Yes |
Yes |
Yes |
Hardware requirement |
Normal PC |
Powerful PC |
High-end PC |
Computer cluster |
Price |
2000 CNY per PC |
10000 CNY per PC |
20000 CNY per PC |
Quotation only |
Note
We also provide Kerloud UAV swarm suite for both indoor and outdoor environment, please consult our sales for details.
Demo
The following video shows briefly the swarm simulation toolbox, and a complete swarm mission for 5 UAVs in a normal PC. The swarm implements decentralized control scheme and inter-robot collision avoidance.