基于跟踪相机的室内自主飞行实现
注意:本文只适用于Kerloud Nano VIO Indoor无人机产品
室内定位作为无人机室内自主飞行的关键技术,实现方式有光流、激光和基于视觉的SLAM方法。 区别于市场已有产品,我们基于对视觉可提供丰富信息(不限于定位)的理解,专注研究视觉方法在室内场景的应用。这里我们将为高级用户提供Kerloud vision drone。
如何配置
固件设置
机载的Kerloud飞控单元在出厂阶段已正确配置。Kerloud Nano VIO indoor可执行室内、室外任务, 我们提供的EKF2_INDOOR_EN参数可便捷切换室内、室外场景:将EKF2_INDOOR_EN置1,无人机自动切换为室内模式。

网络设置
将Kerloud vision drone通过Wi-Fi连接到本地网络,可以轻松实现远程操作。基于ssh工具,用户可以通过相应的IP地址访问机载电脑。
ssh ubuntu@<drone IP address>
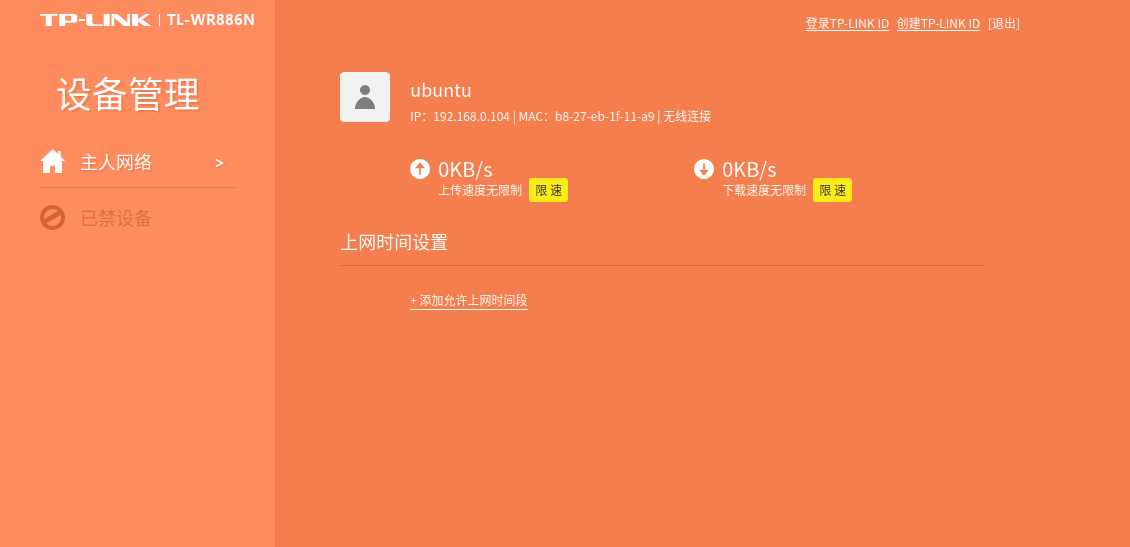
登录所连路由器的管理页面可以查阅无人机的IP地址。以TP-Link路由器为例,用户可以访问192.168.1.1或者http://tplogin.cn来检阅本地网络所连接的全部电脑。 Kerloud vision drone默认使用的计算机名为ubuntu,IP地址显示如下:
Hint
你也可以考虑使用手机热点功能来建立需要的局域网
室内半自动飞行
我们建议所有用户第一步先完成室内半自动飞行,这样有助于验证板载软件的定位精度。Kerloud vision drone采用Intel Realsense追踪摄像头T265作为板载感知, 板载软件含realsense library、mavros和visual odometry 软件包,工作环境位于~/src/catkinws_realsense。
编译工作环境,
cd ~/src/catkinws_realsense
catkin build -j 3
在系统上电启动后等待至少1分钟,启动定位程序,
cd ~/src/catkinws_realsense
bash run.sh
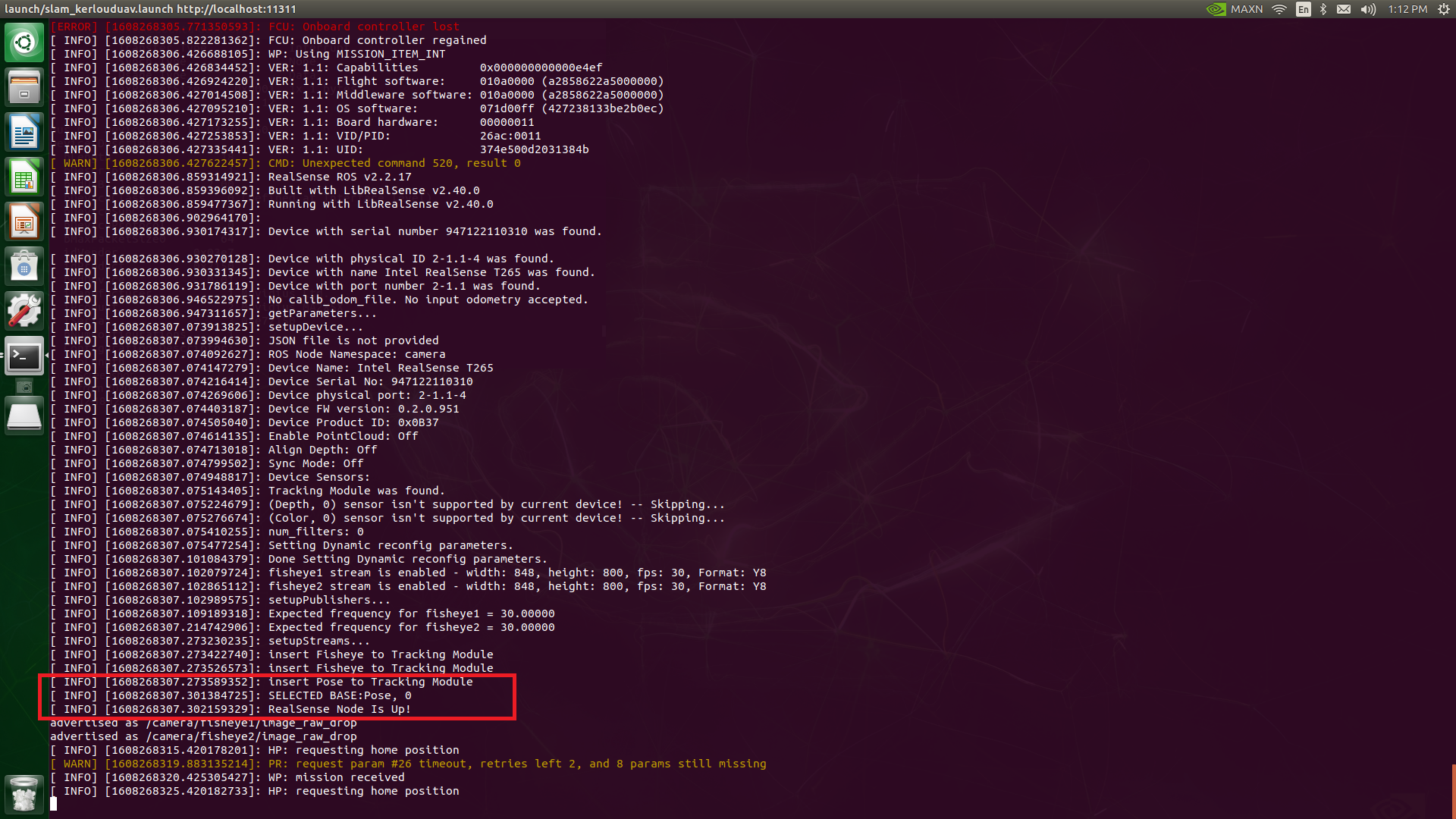
然后我们将在terminal中看到被提取的必要节点,需确认“Realsense is up”消息显示如下:
若Realsense摄像头启动失败,并显示“No realsense devices were found”,这是realsense library的一个已声明bug,详见:https://github.com/IntelRealSense/librealsense/issues/3657, 用户可尝试重新拔插摄像头的USB口,作为临时解决办法;
然后用户通过如下命令打印输出,确认定位结果:
rostopic echo /mavros/odometry/out
在低高度飞行场景下,定位功能通常需20-30秒实现稳定。用户可查阅用于飞控的local position topic来确认定位状态,具体实现方法为在Qground地面站的Mavlink控制台输入如下指令:
listener vehicle_local_position
由于网络负载情况,有时候控制台输出不完整。用户可选择尝试如下指令:
listener vehicle_local_position -n 20
只有在x, y, z位置、速度值全部确认有效时,用户才可以尝试半自动飞行(Position mode)。飞行流程与快速启动章节相同。预期中,飞机的悬停效果与室外相当、甚至更好。
补充说明下,要确保相机前方具备一些特征,不要让飞机面对一堵白墙。
