System Overview
Hardware Components
Astro
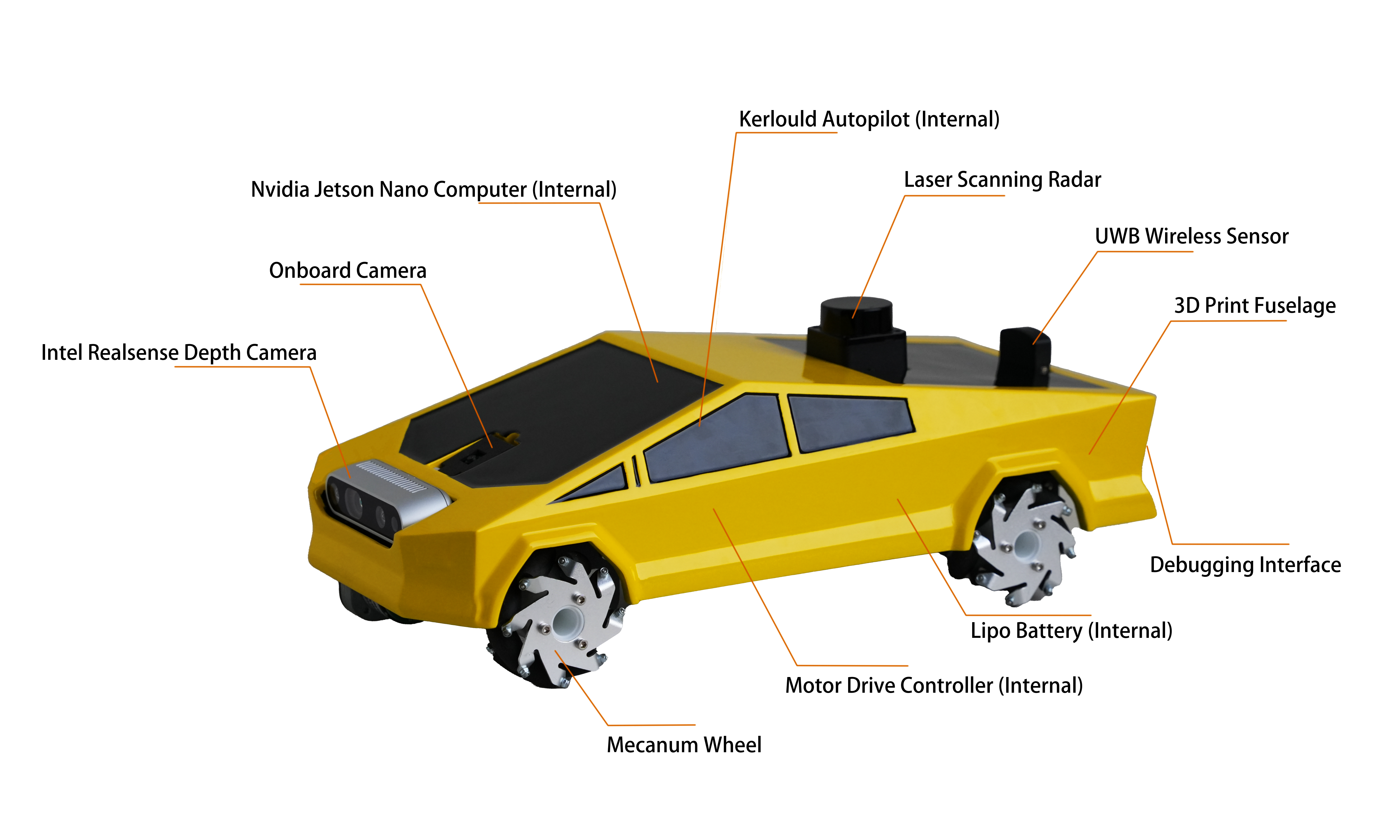
The Kerloud Astro platform consists of several components including optionals as depicted above, and their functionalities are listed below:
Kerloud autopilot: the core unit for rover maneuvering.
Onboard computer: Nvidia Jetson Nano or Xavier NX computer, which is responsible mission management and high-level tasks.
Mecanum wheels & motor set: rover propulsion system.
Depth camera: Intel realsense vision unit to provide onboard depth vision, applicable for stereo vision and SLAM applications.
CSI camera: a vision sensor that offers high-quality onboard images and video stream.
Laser scanner: provides laser scan data for indoor localization and obstacle detection.
UWB sensor: provides sensor data for two-way ranging in 3D indoor localization.
Telemetry: the communication device connecting the onboard autopilot with a ground control station.
Bee
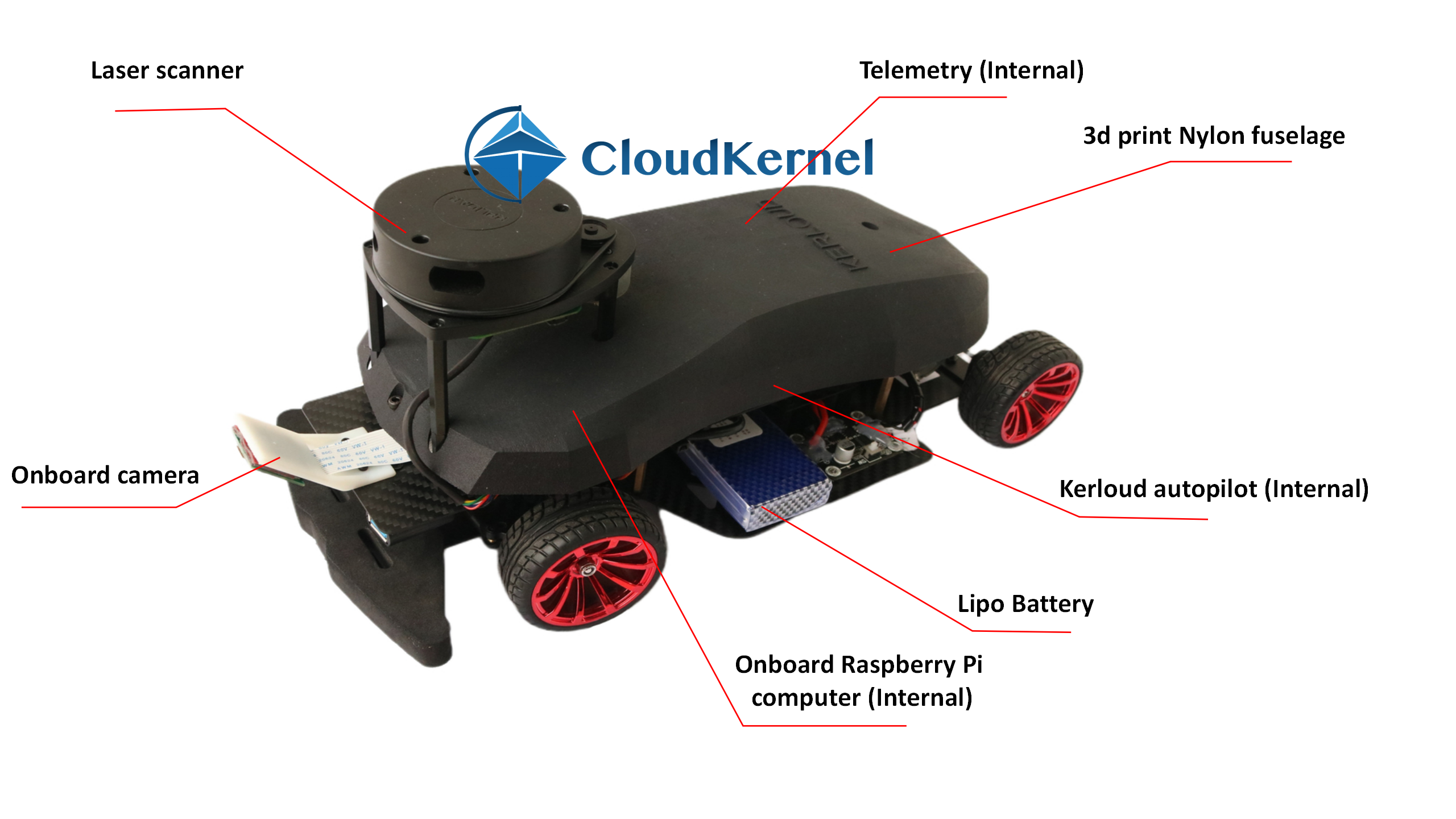
A typical setup of Kerloud Bee rover can be viewed in the figure above, and it’s a small but complete platform capable of autonomous driving. The platform consists of following components:
Kerloud autopilot: the core unit for rover maneuvering.
Onboard computer: such as Raspberry Pi, in charge of mission management and high-level tasks.
Steering servo: a high torque servo unit responsible for rover steering operation.
Rover motor: the main motor for rover propulsion.
Telemetry: the communication device connecting the onboard autopilot with a ground control station.
Note
📌 Details for the Kerloud autopilot can be found in http://cloudkernel-tech.gitee.io/kerloud-autopilot
System Schematics
A typical schematics for the Kerloud Autocar system can be presented as:
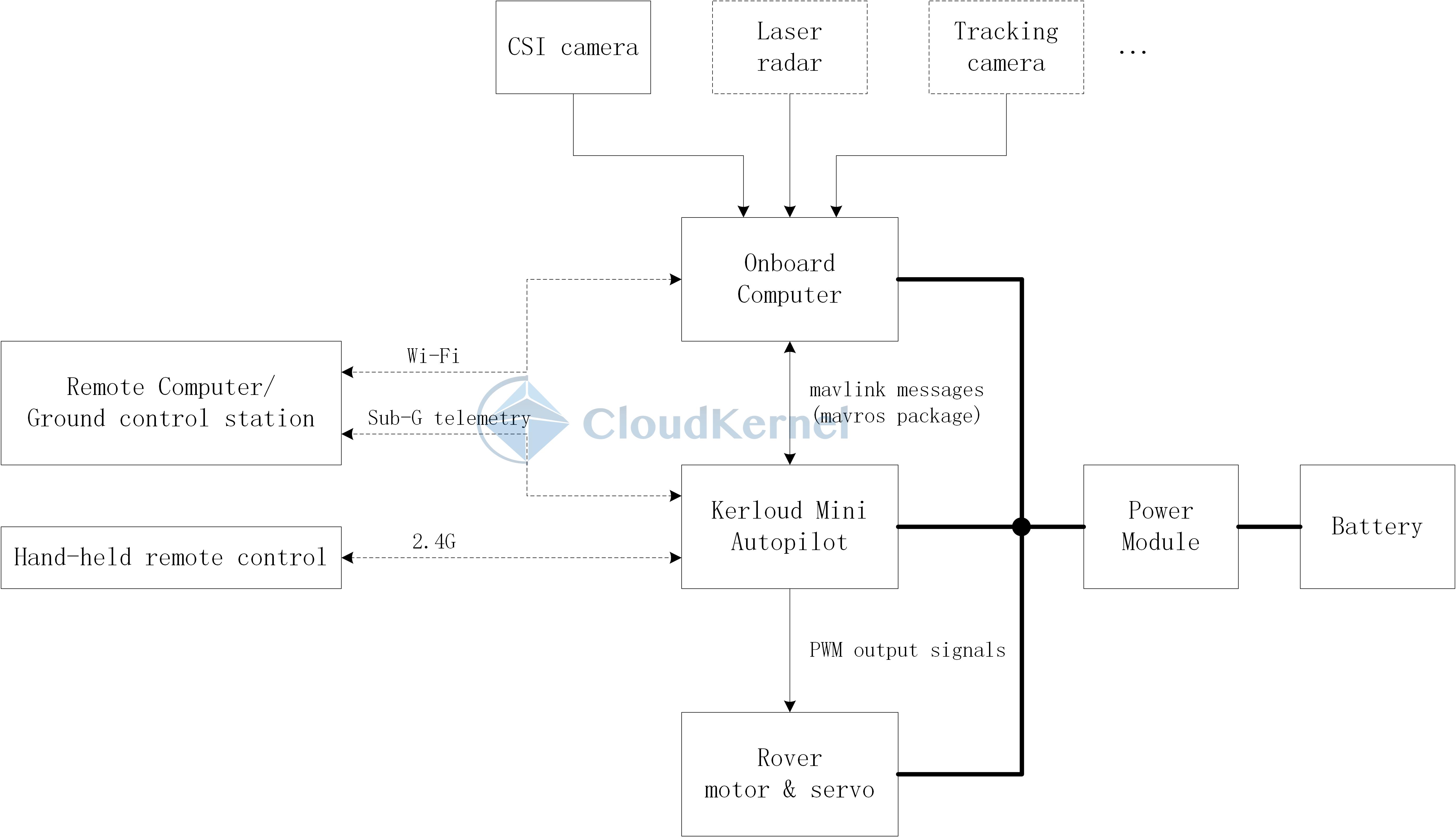
An onboard computer can be employed as a companion computer for high level application development. The Kerloud autopilot generates control signals for low level actuators. The methodology behind this setup is the same with that from the PX4 community.
Note
Details for the PX4 companion computer setup can be found in https://docs.px4.io/master/en/companion_computer/pixhawk_companion.html