地面站任务管理
注:本教程适用于所有 Kerloud flying rover 产品
我们为用户提供定制版的 Qgroundcontrol 软件,可以轻松地为飞车制定航路点任务。Qgroundcontrol 软件可以从 此处 下载, 基本设置过程在快速入门部分已进行说明。
1. 机体状态显示
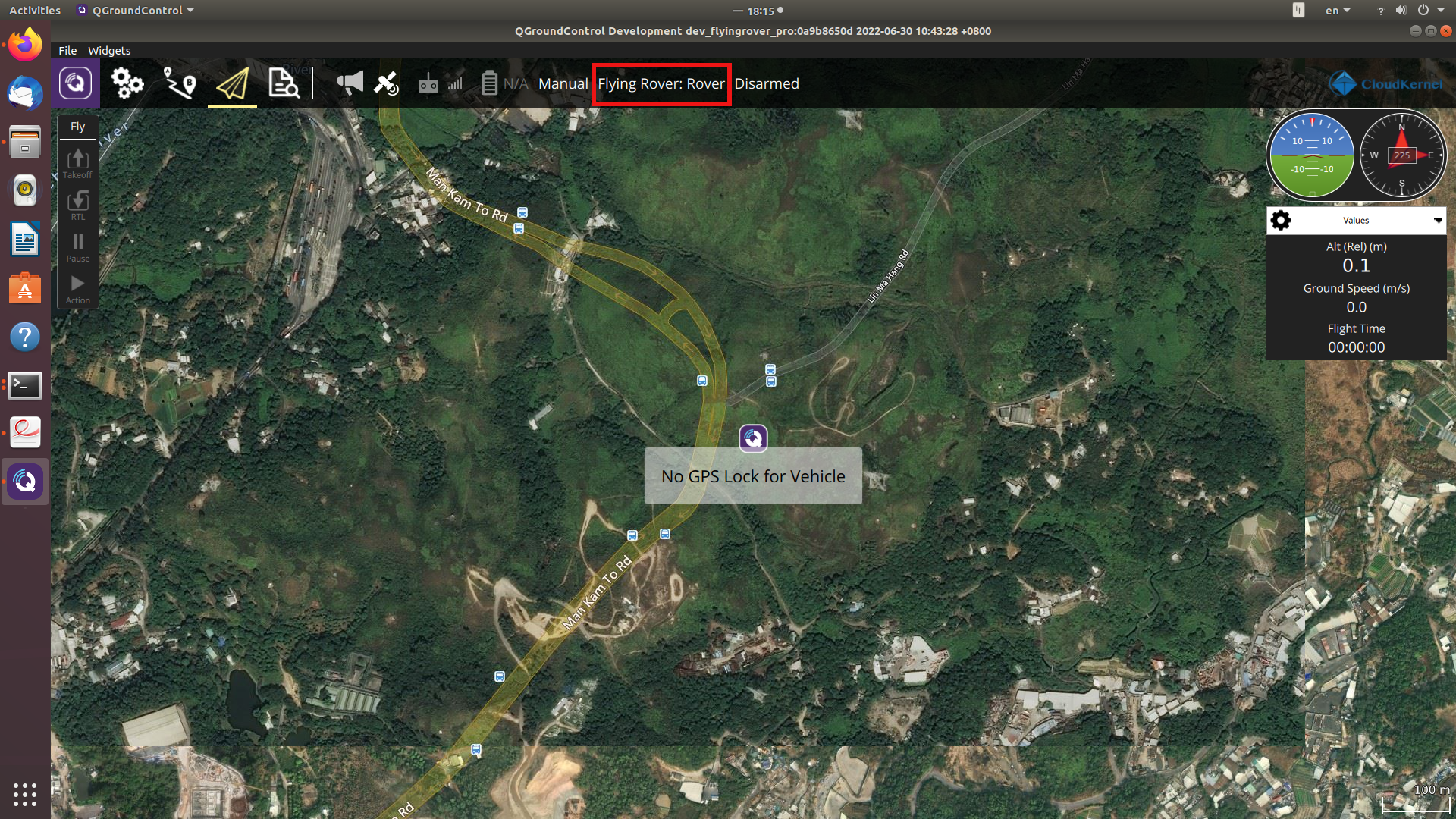
机体状态描述了飞车的当前运行模式,显示位于 Qgroundcontrol 站的 MISSION 栏下,如下图所示。“Flying Rover:Rover”表示飞车处于车模式,“Flying Rover:Multi-Rotor”表示飞车处于多旋翼模式。用户还可以通过点击图标来触发两种模式间的转换。
2. 任务项类型
我们还专门为飞车提供了多种任务项类型。通过单击在规划环节生成的航点图标,用户可以指定机体的任务项类型,位于“flying rover”类别下。
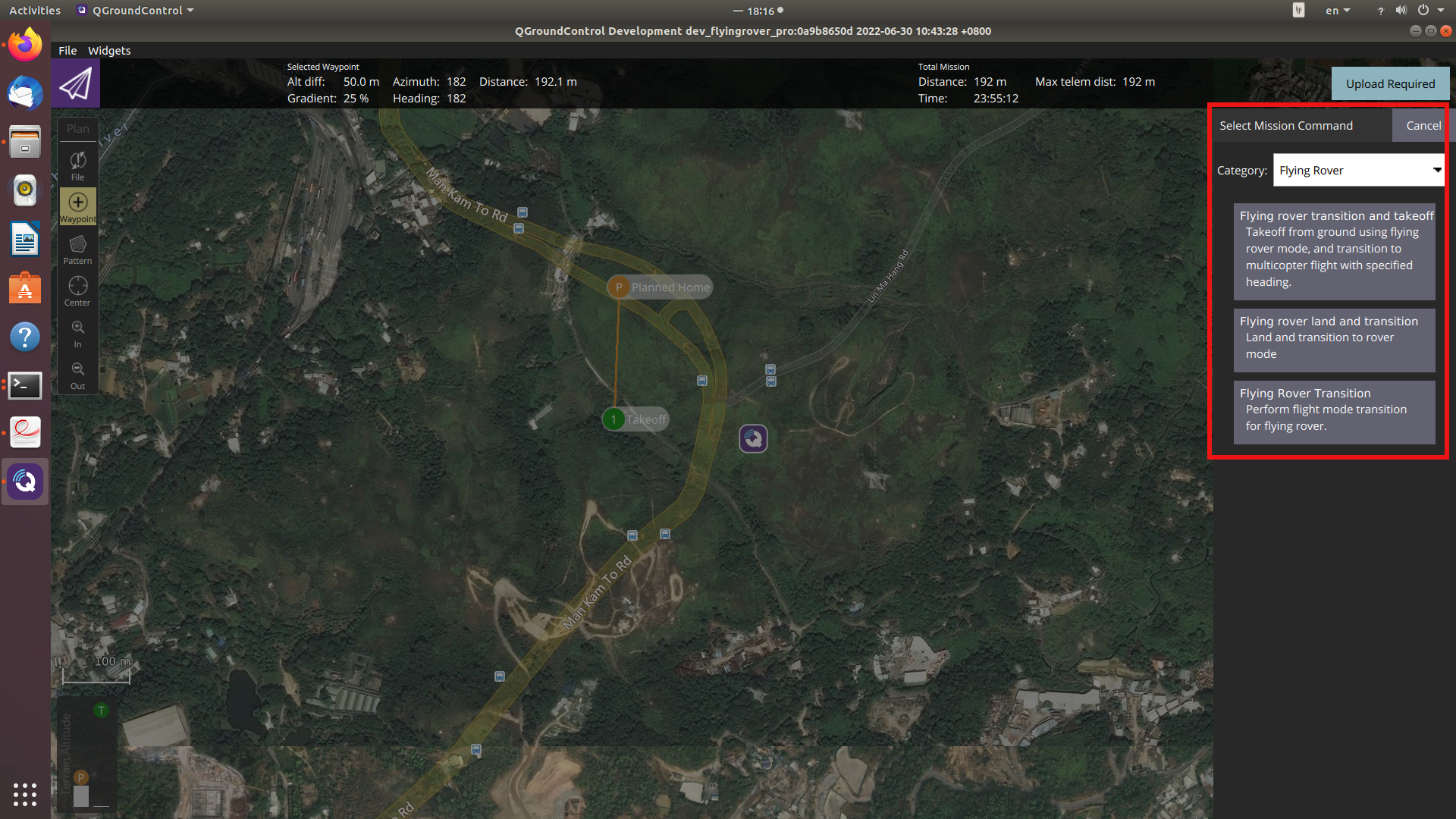
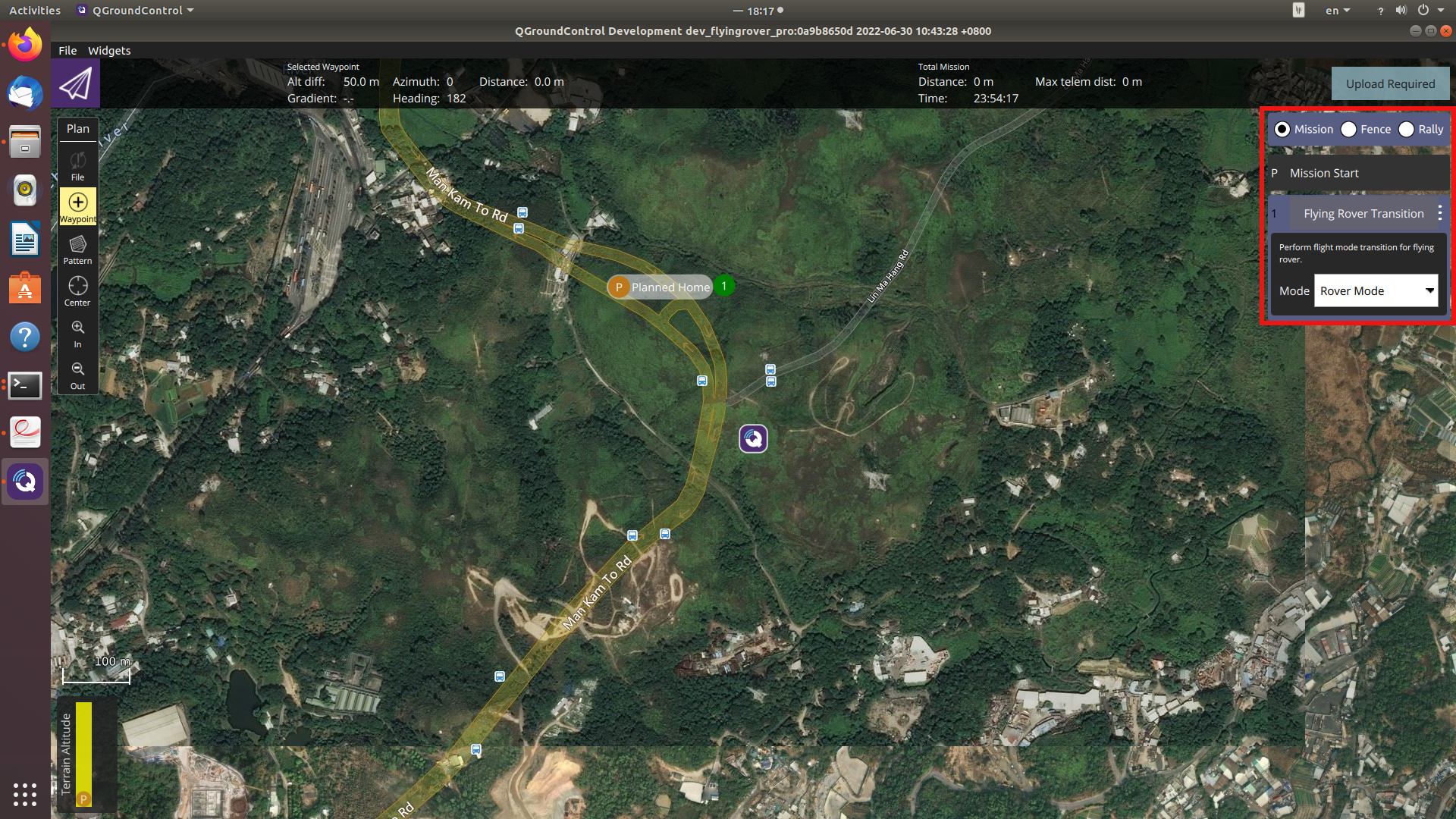
这些命令陈述如下: * Flying rover transition and takeoff::机体先切换到多旋翼模式,然后起飞。 * Flying rover land and transition:机体降落,并在着陆后切换到车模式。 * Flying rover transition:机体将切换到指定的运行模式(如下图示)。
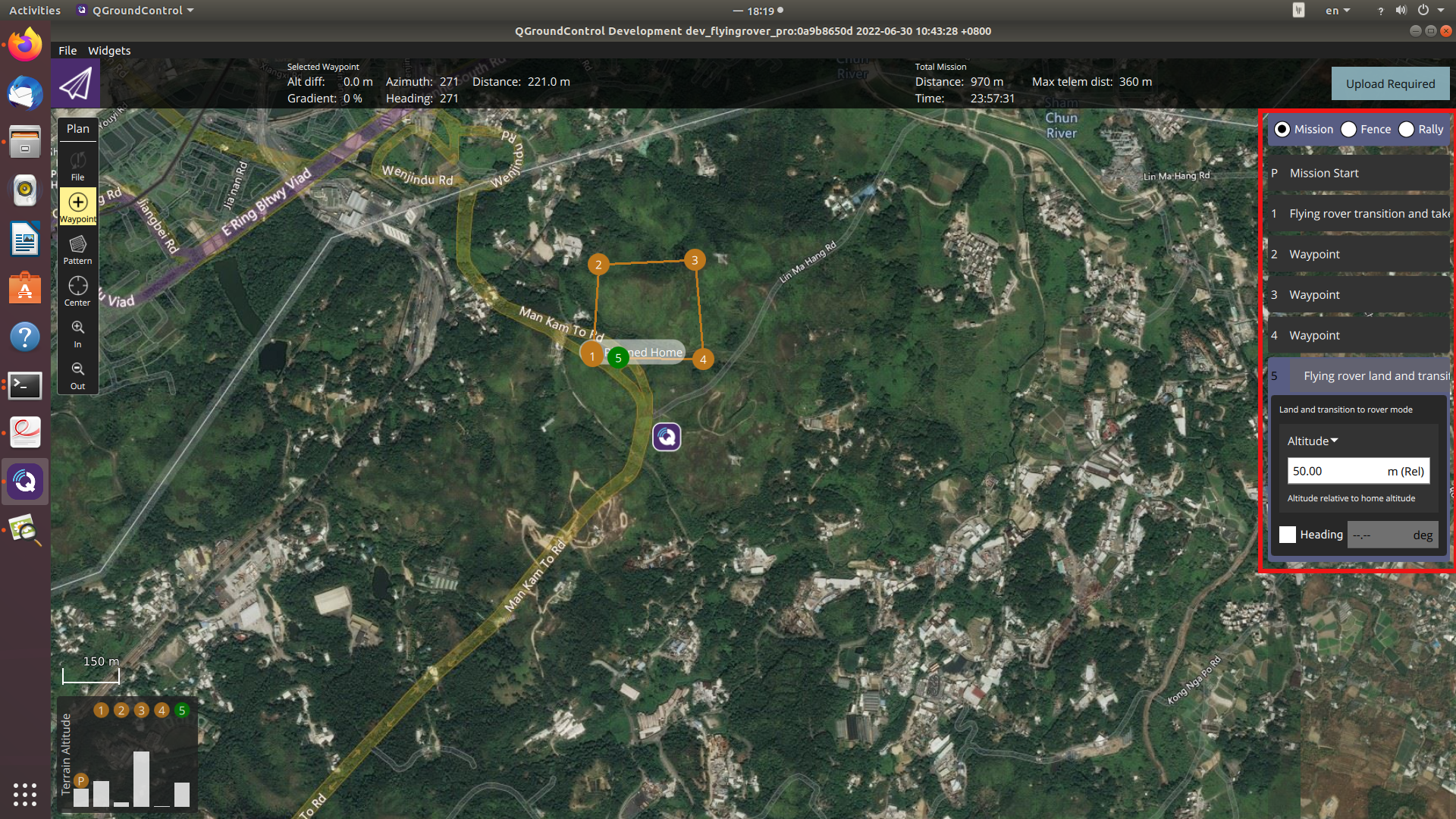
3. 任务示例
下图展示了飞车的一个典型航路点任务。要求机体先切换到多旋翼模式,然后起飞并飞经几个航路点。最后,机体将着陆并切换到车模式。车模式的航路点规划可以以相同的方式进行,其中的高度参数将会被自驾仪自动忽略。