Obstacle Avoidance in Outdoor Environment
Note: This tutorial is applicable for Kerloud 600 Vision
Obstacle avoidance capability in outdoor environment enables a UAV to fly around unforeseen objects during mission planning, which is a commonly required feature for surveillance, landscape mapping, etc. This functionality is implemented in the onboard companion computer as a standalone software. The official repository for obstacle avoidance can be found in https://github.com/PX4/PX4-Avoidance. However, since the repository has not been updated for a long time, it is not practical for users to deploy it directly for real flight.
Environment Setup
The Kerloud 600 vision configuration is equipped with a Nvidia Jetson Nano compuater and an Intel Realsense D435i camera. The obstacle avoidance software is prepared under the workspace ~/src/uav_space/catkinws_avoidance. We have tested the code thoroughly during factory to ensure the complete suite works properly. The supported OS is Ubuntu 18.04 with ROS melodic.
The avoidance package is delivered in the dev_kerlouduav branch, so be sure to switch to that branch to avoid potential software bugs.
How to Use
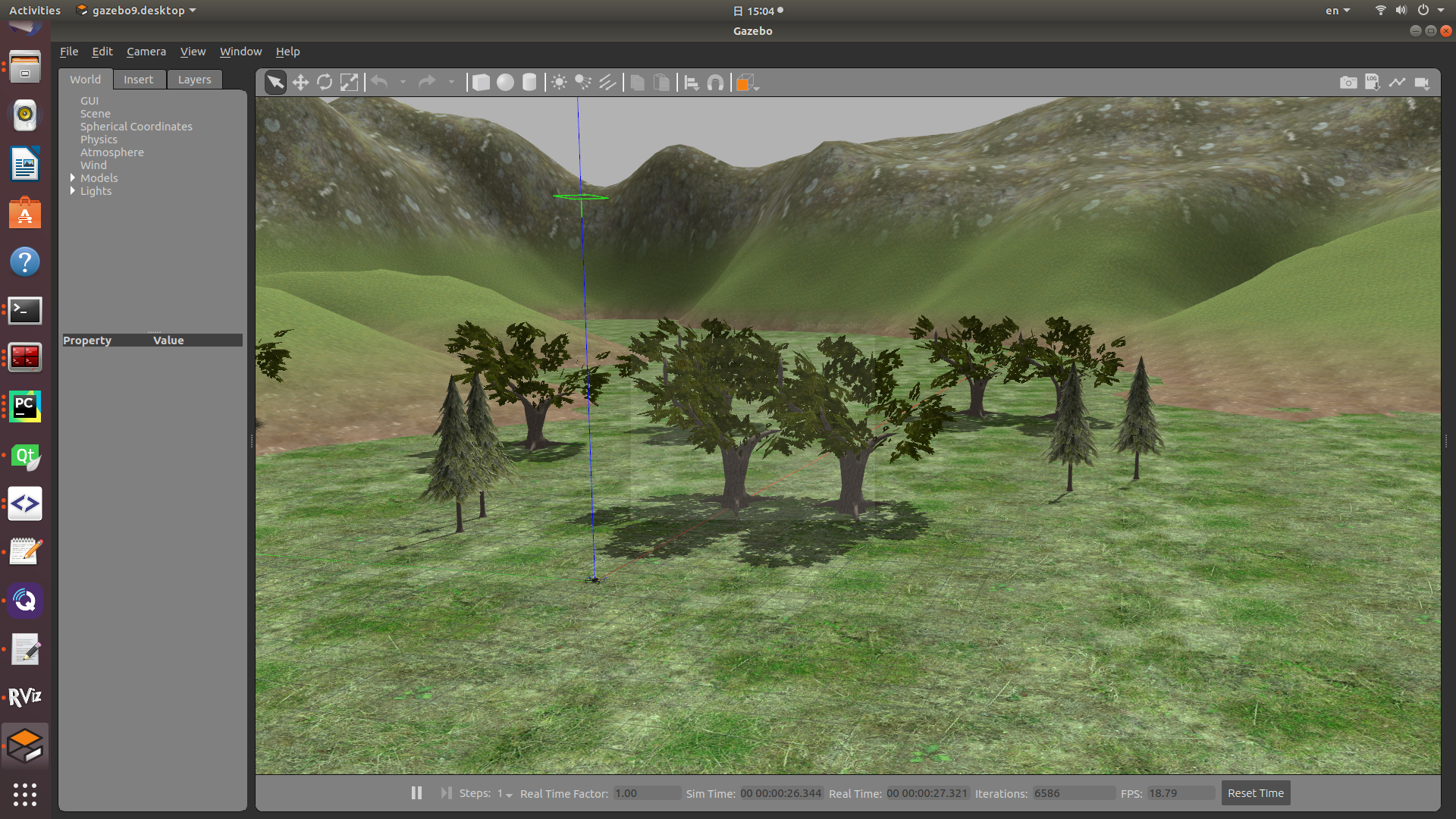
Simulation Test
The simulation test can only be performed in a personal computer instead of the companion computer. Assuming that the px4 firmware is located in ~/Firmware with default v1.10.0 version, users can start the simulation with the following commands:
# Open a terminal, and build the sitl target for px4 firmware
sudo apt install ros-melodic-gazebo-ros* # necessary for gazebo ros interface
cd ~/Firmware
# This is necessary to prevent some Qt-related errors (feel free to try to omit it)
export QT_X11_NO_MITSHM=1
# Build and run simulation
make px4_sitl_default gazebo
Then the local planner can be started in this manner:
# open a terminal (terminal 1)
cd ~/src/uav_space/catkinws_avoidance
source devel/setup.bash
# add environment setting
. ~/Firmware/Tools/setup_gazebo.bash ~/Firmware ~/Firmware/build/px4_sitl_default
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:~/Firmware
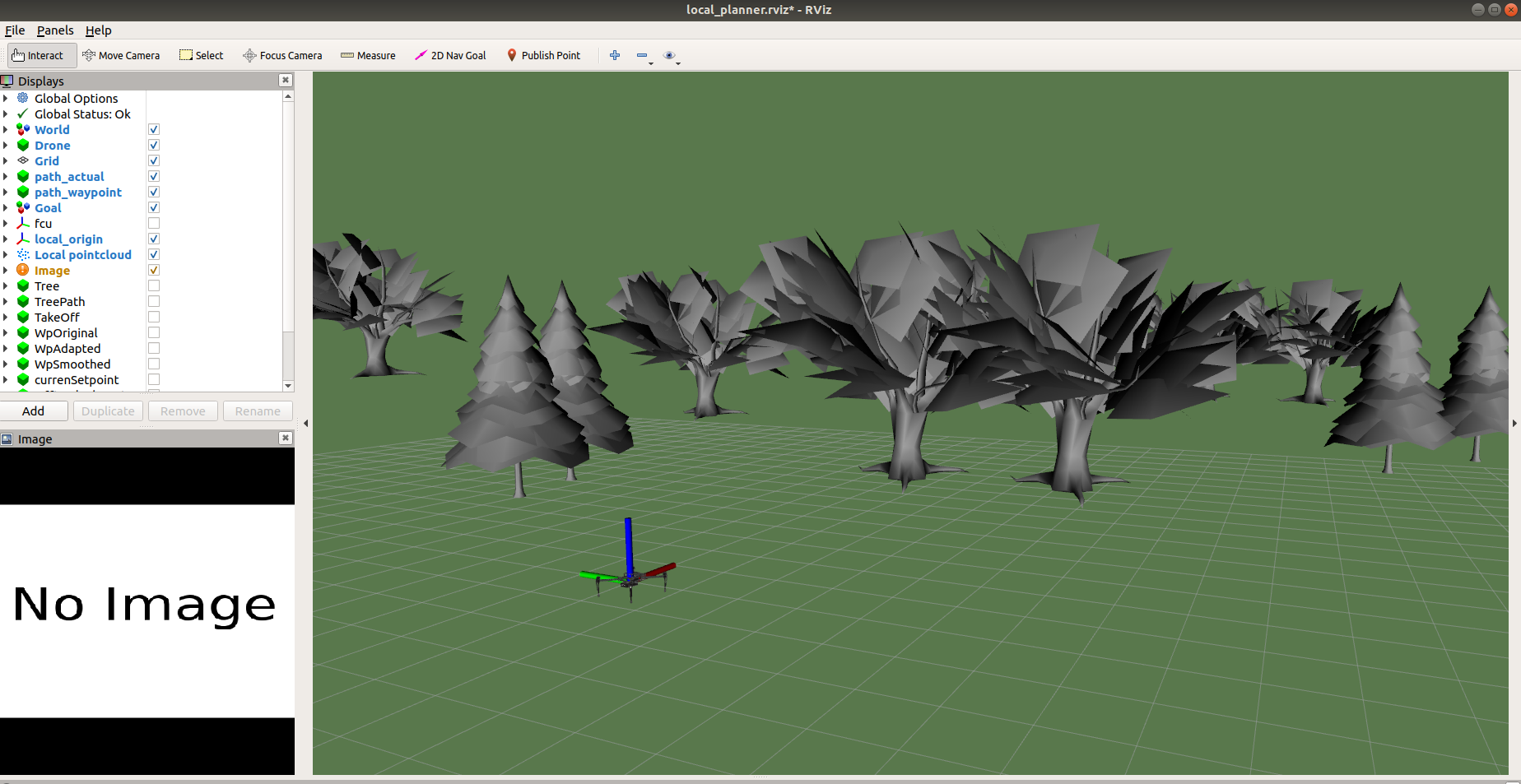
roslaunch local_planner local_planner_stereo.launch
# open another terminal to view image (terminal 2)
cd ~/src/uav_space/catkinws_avoidance
source devel/setup.bash
rosrun image_view stereo_view stereo:=/stereo image:=image_rect_color
# open another terminal (terminal 3)
rosrun mavros mavsys mode -c OFFBOARD
rosrun mavros mavsafety arm
Users can then set nav goal by pressing 2D nav button and double clicking in the rviz interface.
The global planner can be brought up similarly as the local planner case.
# open a terminal (terminal 1)
cd ~/src/uav_space/catkinws_avoidance
source devel/setup.bash
# add environment setting
. ~/Firmware/Tools/setup_gazebo.bash ~/Firmware ~/Firmware/build/px4_sitl_default
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:~/Firmware
roslaunch global_planner global_planner_stereo.launch
# open another terminal (terminal 2)
rosrun mavros mavsys mode -c OFFBOARD
rosrun mavros mavsafety arm

Hint
The local planner is recommended by the official guide, which supports higher speed (3m/s) than the global planner (1.5m/s).