室内光流定位
注意:本教程适用于Kerloud系列无人机中的光流配置款型。
搭载光流配置的Kerloud无人机,为用户以少量设置实现室内定位提供了方便的选择。该平台配备有 PX4FLOW光流传感器 和 北醒TF-Luna激光测距仪 , PX4FLOW是PX4社区中的一款基于摄像头的智能传感器,在水平速度估计方面表现出色;激光测距仪则可在高度测量中提供厘米级精度。 该配置飞机在具备纹理地面的室内环境中,水平、垂直定位精度分别可达到0.1m、0.05m级别。此外,飞机也支持室外环境下的无GPS飞行。
如何设置
环境要求
使用光流传感器,需要室内地面具备丰富的纹理,因此建议用户使用棋盘纸或其他图案来对地面进行覆盖、装饰,棋盘纸图片可通过此 链接 下载。另外,PX4FLOW相机的光照条件也要足够。
固件设置
搭载光流配置的Kerloud无人机在出厂阶段已正确配置。面向室内场景,可在QGroundcontrol界面中配置如下参数:
SENS_EN_TF 2
SENS_EN_PX4FLOW: 1
EKF2_HGT_MODE: 2
EKF2_AID_MASK: 2
EKF2_MAG_TYPE: 0
EKF2_OF_POS_Y: -0.07
参数说明如下:
SENS_EN_TF: 启动北醒TF测距传感器驱动程序。
SENS_EN_PX4FLOW: 启动PX4FLOW驱动程序。
EKF2_HGT_MODE: 将激光测距仪设置为主要高度信息源。
EKF2_AID_MASK: 启动EKF估计中的光流设置。
EKF2_MAG_TYPE: 设置磁力计航向测量为自动模式。
EKF2_OF_POS_Y: 设置光流传感器在体坐标系Y轴的相对位置。
光流对焦设置
PX4FLOW传感器的相机镜头在出厂时已调好,官方调参指引可参见: https://docs.px4.io/master/en/sensor/px4flow.html。
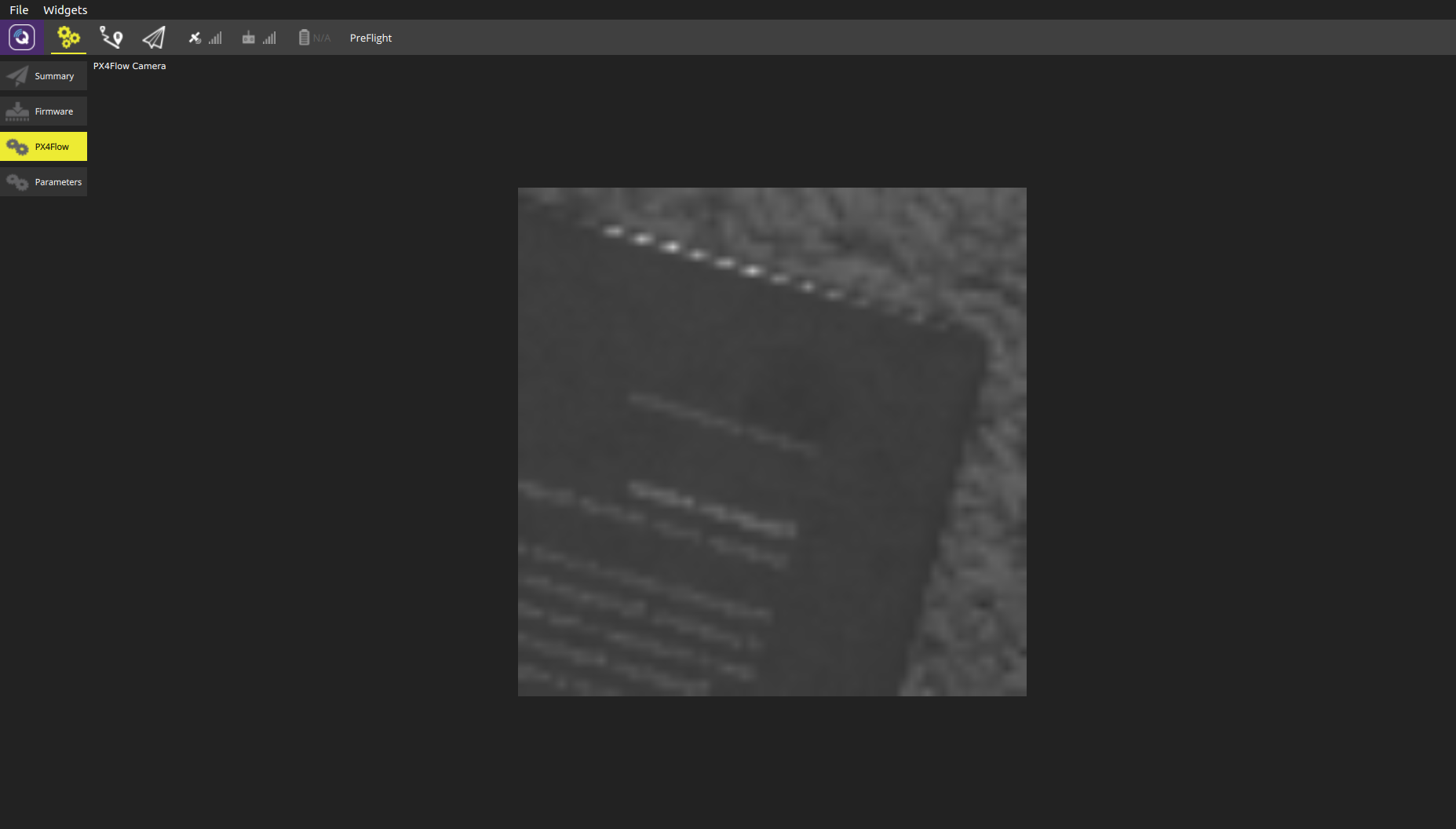
简要陈述:用户可使用提供的micro-usb线,将PX4FLOW传感器接入运行有QGC的电脑, 然后在QGC设置菜单中选择PX4FLOW,很快就能在QGC界面中看到来自PX4FLOW相机的图像。 用户可简单地放置一本书在地面,将相机抬高到想要飞行的高度(一般为1~3米),拧下固定螺丝,然后通过拧松、拧紧镜头寻找焦点位置以实现对焦。 当书本的边缘在图像中清晰可见时(参见下图),调焦结果可视为能接受。
传感器数据查看
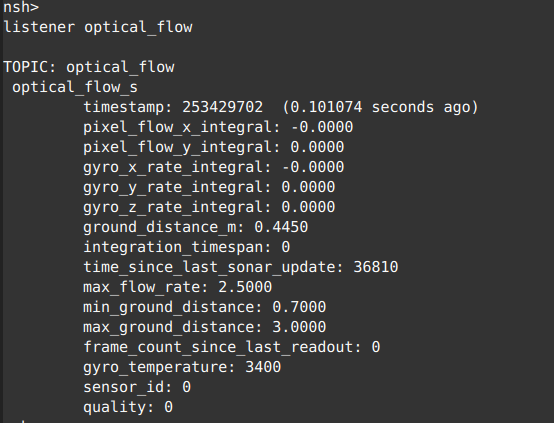
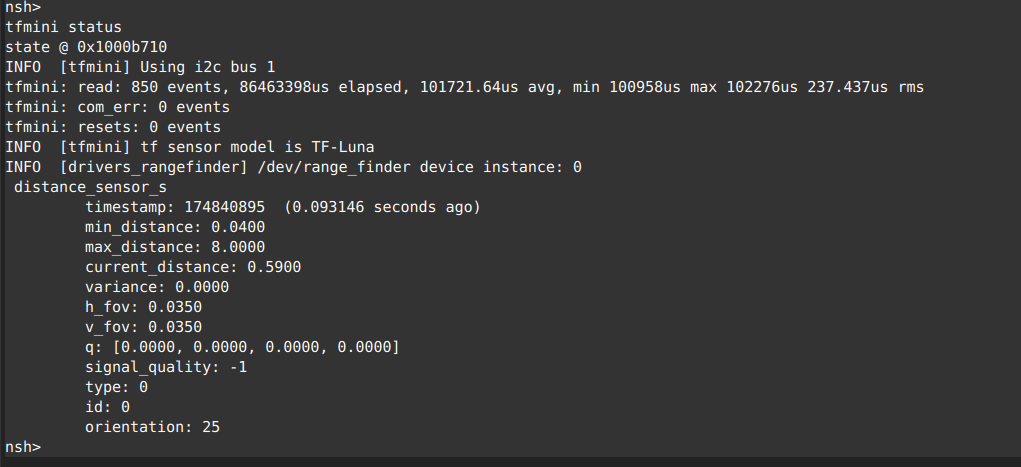
设置后可以通过QGC地面站交互界面查看确认光流传感器和激光测距传感器数据:
演示视频
该视频演示了按照快速启动指南中步骤实现的半自动室内飞行。
参考文献
Dominik Honegger, Lorenz Meier, Petri Tanskanen and Marc Pollefeys. [An Open Source and Open Hardware Embedded Metric Optical Flow CMOS Camera for Indoor and Outdoor Applications](https://github.com/PX4/px4_user_guide/raw/master/assets/hardware/sensors/px4flow/px4flow_paper.pdf).