基于立体视觉和GPU加速的视觉里程系统(VINS)
注意:本文只适用于 Kerloud SLAM Indoor无人机产品
Kerloud SLAM Indoor配备有Nvidia TX2模块和Intel Realsense D435i立体摄像头。凭借更强大的GPU内核,硬件配置能够通过纯视觉实现完全自主的室内定位。VINS系统为视觉辅助自主控制和其他应用(如 SLAM、AR(增强现实))开辟了广泛的机会。该产品适合需要深入研究计算机视觉和机器人自主控制的高端用户。
背景
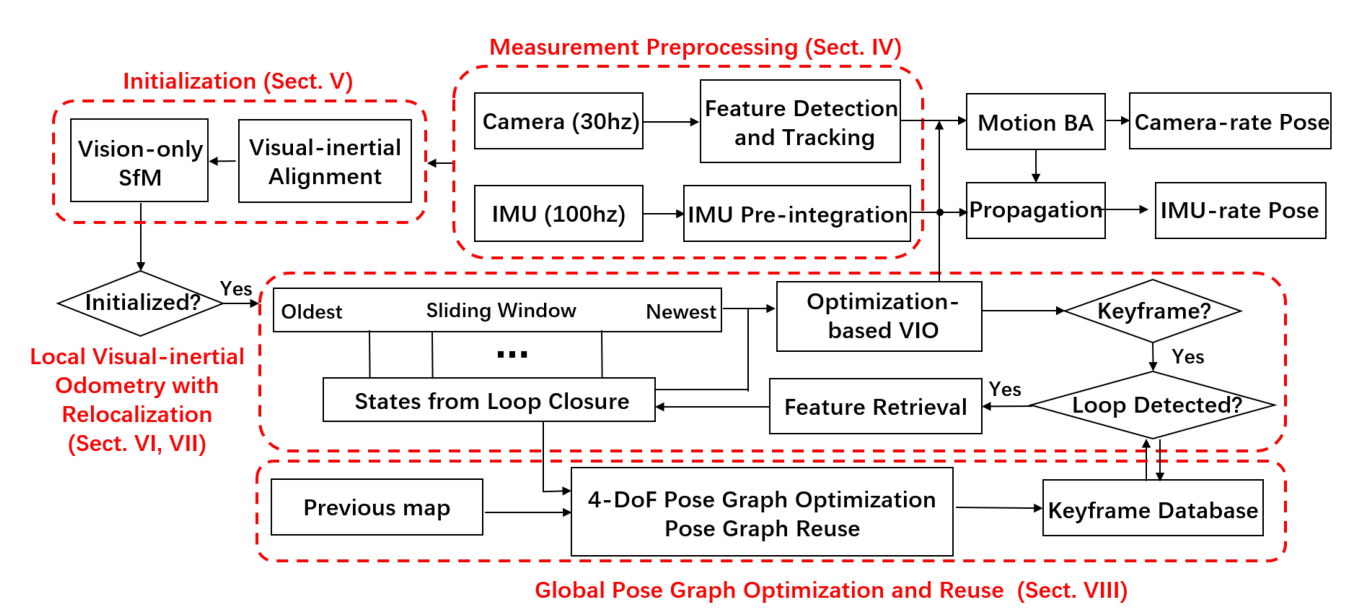
VINS系统是基于香港科技大学空中机器人组 (https://uav.hkust.edu.hk) 的原创作品,相关资源可以在本教程的参考部分中找到。该方法将IMU数据与机载计算机视觉无缝融合,可输出实时姿态估计。它提供了从前端IMU预集成到后端全局优化的完整通路,如下图所示:
包含内容
请注意,原始开源代码无法直接部署在无人机上,需要复杂的设置才能让用户实现成功飞行。我们所做的工作包括以下几个方面:
具备必要前提(如OpenCV、英特尔实感库等)的完整软件环境配置
包含内参、外参的相机校准
VINS与Realsense立体视觉融合的配置
与飞控集成以实现底层状态估计
数据集仿真、手持移动和自主飞行测试
如何使用
位于路径~/src/catkin_ws_VINS-Fusion-gpu中的VINS系统工作区包含如下软件包:
VINS-Fusion-gpu:具备GPU加速的VINS算法包,专为Kerloud无人机定制。
vison_opencv:用于连接ROS与OpenCV的软件包。
pose_converter:用于连接里程计系统与飞控系统的软件包。
可使用如下指令启动VINS系统:
# terminal 1
roscore
# terminal 2: launch mavros node
cd ~/src/catkinws_realsense \
&& source devel/setup.bash \
&& roslaunch mavros px4.launch fcu_url:=/dev/ttyPixhawk:921600
# terminal 3: launch realsense driver node
cd ~/src/catkinws_realsense \
&& source devel/setup.bash \
&& roslaunch realsense2_camera rs_d435i_kerloud_stereo_slam.launch
# terminal 4: launch VINS node
cd ~/src/catkin_ws_VINS-Fusion-gpu \
&& source devel/setup.bash \
&& rosrun vins vins_node /home/ubuntu/src/catkin_ws_VINS-Fusion-gpu/src/VINS-Fusion-gpu/config/kerloud_tx2_d435i/realsense_stereo_imu_config.yaml
# (Optional) terminal 5: launch vins-loop-fusion node
cd ~/src/catkin_ws_VINS-Fusion-gpu \
&& source devel/setup.bash \
&& rosrun loop_fusion loop_fusion_node /home/ubuntu/src/catkin_ws_VINS-Fusion-gpu/src/VINS-Fusion-gpu/config/kerloud_tx2_d435i/realsense_stereo_imu_config.yaml
# terminal 6: launch pose_converter node
cd ~/src/catkin_ws_VINS-Fusion-gpu \
&& source devel/setup.bash \
&& roslaunch pose_converter poseconv.launch
# (Optional) terminal 7: launch rviz for visualization
cd ~/src/catkin_ws_VINS-Fusion-gpu \
&& source devel/setup.bash \
&& roslaunch vins vins_rviz.launch
或者更简单地:
cd ~/src/catkin_ws_VINS-Fusion-gpu \
&& bash run.sh
演示
使用数据集仿真
基于Euroc数据集的仿真测试可以使用以下命令进行:
cd ~/src/catkin_ws_VINS-Fusion-gpu \
&& source devel/setup.bash \
&& roslaunch vins vins_rviz.launch \
&& rosrun vins vins_node ~/src/catkin_ws_VINS-Fusion-gpu/src/VINS-Fusion/config/euroc/euroc_stereo_imu_config.yaml
# Optional:
cd ~/src/catkin_ws_VINS-Fusion-gpu \
&& source devel/setup.bash \
&& rosrun loop_fusion loop_fusion_node ~/src/catkin_ws_VINS-Fusion-gpu/src/VINS-Fusion/config/euroc/euroc_stereo_imu_config.yaml \
&& rosbag play YOUR_DATASET_FOLDER/MH_01_easy.bag

地面测试
VINS手持测试:

VINS动态地面测试:

自主室内悬停

参考资料
VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator, Tong Qin, Peiliang Li, Zhenfei Yang, Shaojie Shen, IEEE Transactions on Robotics. 2018.