High Accuracy Waypoint Mission with RTK GPS
About RTK GPS
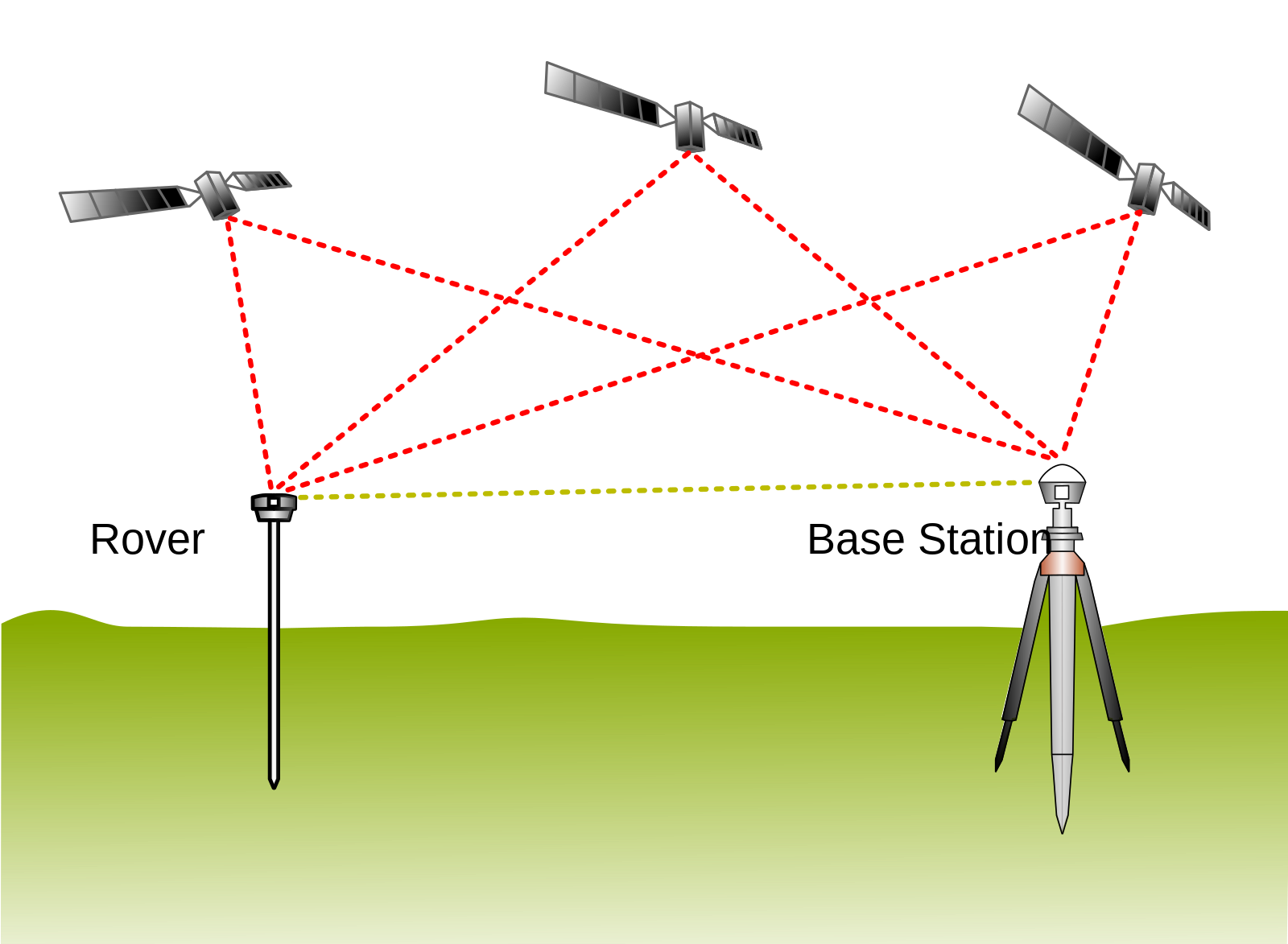
Kerloud autocar is capable of realizing centimeter accuracy waypoint mission with the aid of an RTK GPS receiver. The RTK (Real-time kinematic) GPS uses measurements of the phase of GPS signal’s carrier wave in addition to the information content of the signal and relies on a single reference station to provide real-time corrections. The setup of an RTK GPS can be referred in the figure below, which is adopted from the Wikipedia.
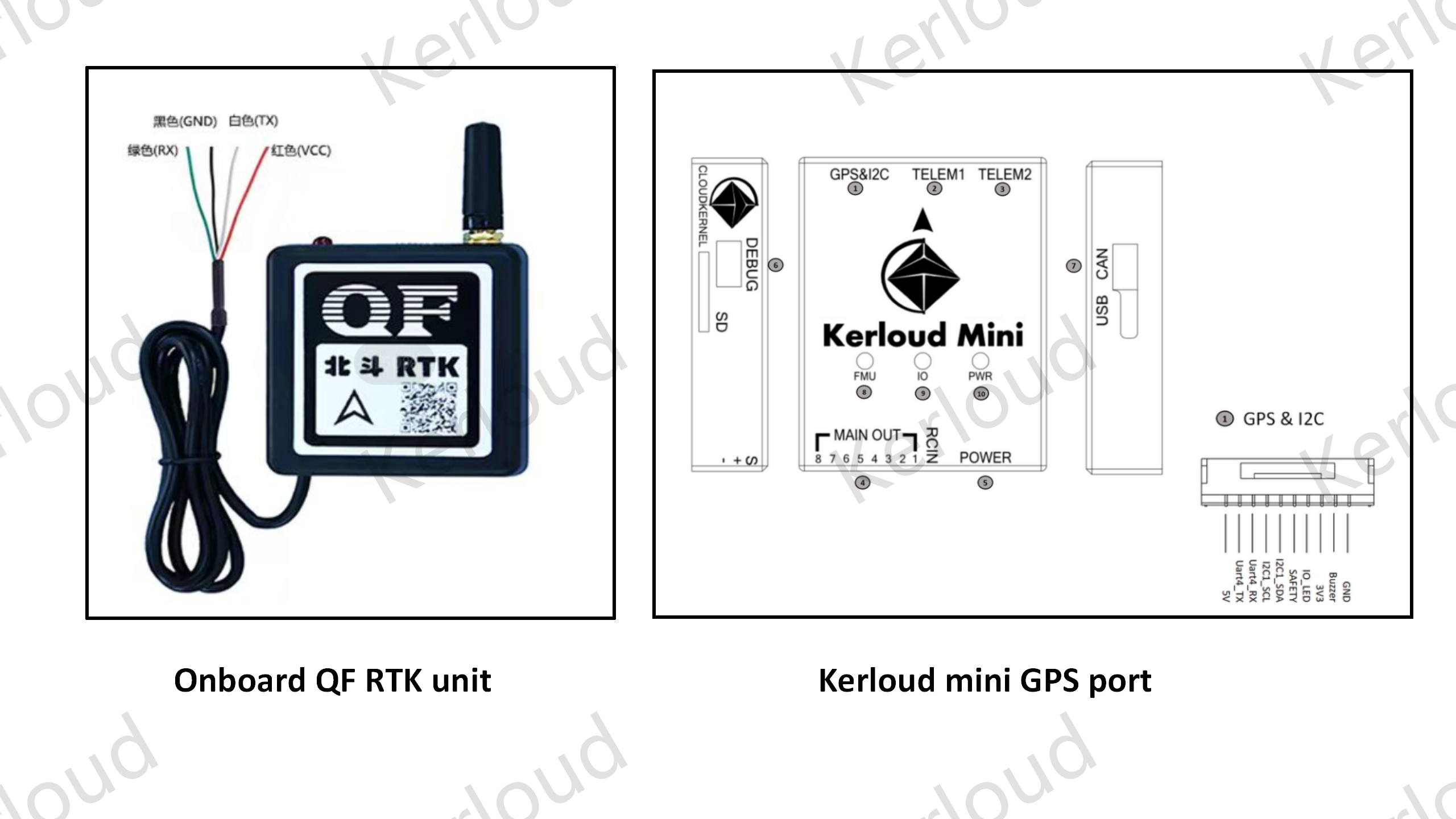
Kerloud autocar supports various RTK GPS in the PX4 community (see link). Here we introduce another commercially available RTK GPS set, the QF RTK from Qonfon . The QF RTK device can provide centimeter accuracy within half a minute in common outdoor environment, and it can collect signals from 184 satellites at most simultaneously.

Hardware Connection
The hardware connection is quite straightforward for the onboard QF RTK unit. The unit is designed with a UART port, and it doesn’t need additional powering. The unit is connected with our Kerloud mini autopilot via the GPS port, as depicted below:
We then can mount the RTK unit on the rover like below:

Hint
More information about the Kerloud mini autopilot can be found in http://cloudkernel-tech.gitee.io/kerloud_mini/en/
Software Setup
To enable the QF RTK driver, what we have to do is to set SER_GPS1_BAUD as 115200. The autopilot implements an improved control scheme based on the ackermann bicycle model. Users don’t need to change the onboard parameters for most cases. The parameters below are what might matter in real driving, and users are suggested to keep a back up of the original parameters before tuning.
GND_ACT_ALG: 0: default px4 rover control scheme; 1: ackermann bicycle kinetic algorithm
GND_YAW_P: P gain for bearing control in ackermann bicycle kinetic algorithm
GND_MAX_YRATE: Max yaw rate for bearing control in ackermann bicycle kinetic algorithm
GND_WHEEL_BASE: Distance from front axle to rear axle for a rover
GND_SPEED_MAX: maximum allowed speed for the rover
Hint
Please consult our after-sales about more sophisticated tuning for better performance. Cloudkernel Technologies can provide full-stack integration support.
Demo
A demo on waypoint mission carried out by the Kerloud autocar equipped with the QF RTK set is presented below.