Peripheral Configurations
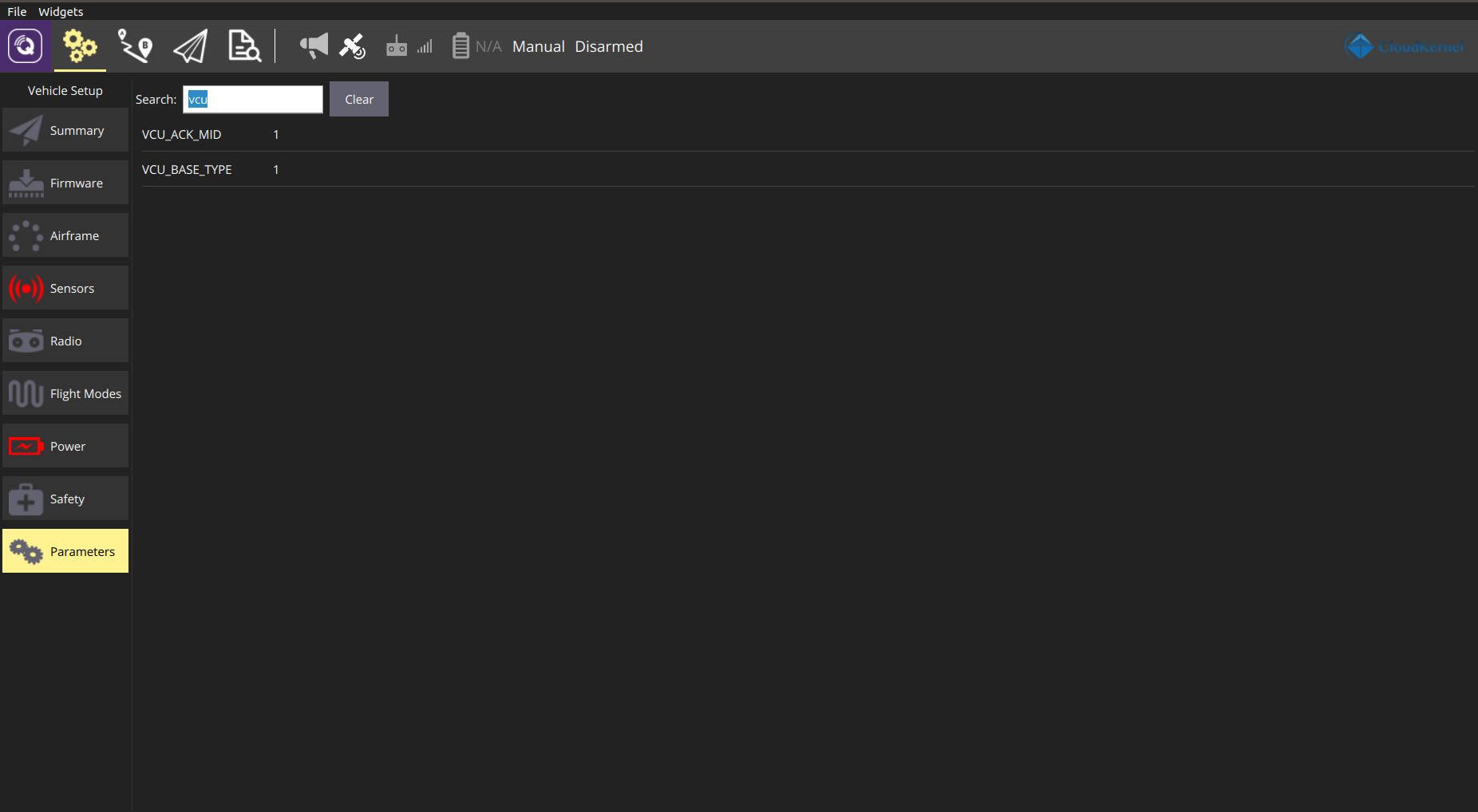
Peripheral configurations can be easily done via the parameter setting interface in the QGroundcontrol software as depicted below. By default, products we deliver are configured properly in factory for peripherals selected by our customers. The documentation here provides a reference for adaptation on the user side.
AGV Chassis
YUHESEN Robot
Model MK ROBOT-01

Parameters to enable the MK robot-01 are listed as:
VCU_BASE_TYPE = 1 # enable the ackermann vehicle type VCU_ACK_MID = 1 # model id for MK robot -01
Model FW-MAX

Parameters to enable the FW-max are listed as:
VCU_BASE_TYPE = 2 # enable the 4 wheels differential drive vehicle type VCU_DD4_MID = 1 # model id for FW-max
RTK Devices
QF RTK
Model R3C

Parameters to enable the R3C RTK are listed as:
SER_GPS1_BAUD = 115200 # baud rate for RTK serial communication GPS_RTK_ID = 1 # model id
Comnav Technology
Model M100

Parameters to enable the M100 Comnav RTK with the comnav binary protocol are listed as:
SER_GPS1_BAUD = 115200 # baud rate for RTK serial communication GPS_RTK_ID = 2 # model id