Simulation Environment for Software Validation
We devise simulation environment for various scenarios with Pursuit autopilot, so that users can validate their software directly in simulation without field test. The environment is based on the Gazebo engine.
Hint
The software package is delivered with proprietary thumbdrives on additional payment, please consult our sales on how to purchase.
1. Workspace Directory
The workspace for the simulation environment is located in ~/pursuit_space/sitl_space_pursuit in the provided thumbdrive. Users can easily boot their computers from the thumbdrive following the user manual.
2. How to Use
We support several simulation cases as below.
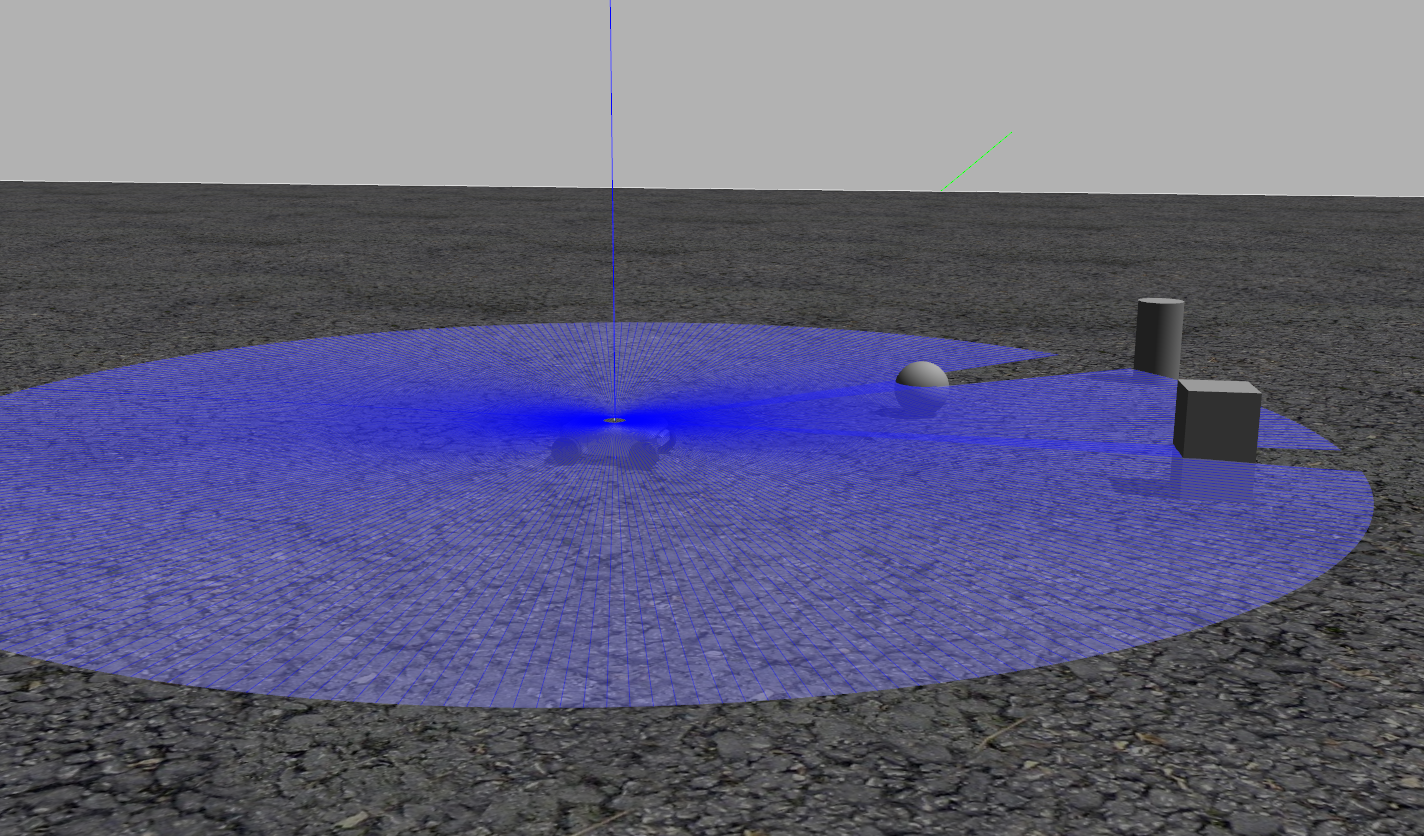
Case 3: Offboard control in outdoor cluttered environment with 2D lidar
We also support the simulation of ground vehicles equipped with 2D lidar, which is the main feature for our model A+. The launch file below can activate 2D lidar and its corresponding ROS topics. Users have to set GND_RMC_OBS_EN as 0 manually in QGroundcontrol to enable offboard control.
source setup_pursuit.bash
roslaunch launch/mavros_posix_sitl_pursuit_base_rplidar.launch