地面站的控制台界面
我们在 QGroundcontrol 软件的控制台界面中提供了方便的命令。这些命令可以帮助用户显示系统状态并定位硬件和软件层中的故障。
传感器状态
Pursuit 自动驾驶仪由多个传感器组成,用于全面融合传感器,包括加速度计、陀螺仪、气压计和磁力计。 传感器数据对系统运行至关重要,但这些传感器并非防错,因为它们可能会因长期振动、过热和潮湿而退化。 因此,当系统未按预期工作时,始终建议用户先检查传感器数据。
要在自动驾驶仪中查看传感器数据,只需在 Mavlink 控制台中输入命令即可:
listener sensor_accel # display accelerometer data
listener sensor_gyro # display gyroscope data
listener sensor_baro # display barometer data
listener sensor_mag # display magnetometer data
当相应命令没有输出时,传感器有问题。
无人车底盘状态
AGV 底盘的 VCU 单元通过 CAN 总线连接到自动驾驶仪。
要查看 VCU 状态,只需尝试:
vcu_bridge status # display the driver status for VCU communication
listener vcu_base_status # display the vcu base status
listener vcu_control_cmd # display the command sent to the vcu base
用户也可以通过指令使底盘进行简单运动测试:
vcu_bridge test
RTK定位状态
RTK gps 通过串口连接到自动驾驶仪,可以通过以下方式查看 gps 数据:
gps status # display the gps driver status
listener vehicle_gps_position #display gps data published to the sensor fusion module
无人车系统状态
整车状态(姿态、位置和速度)可以通过以下方式查看:
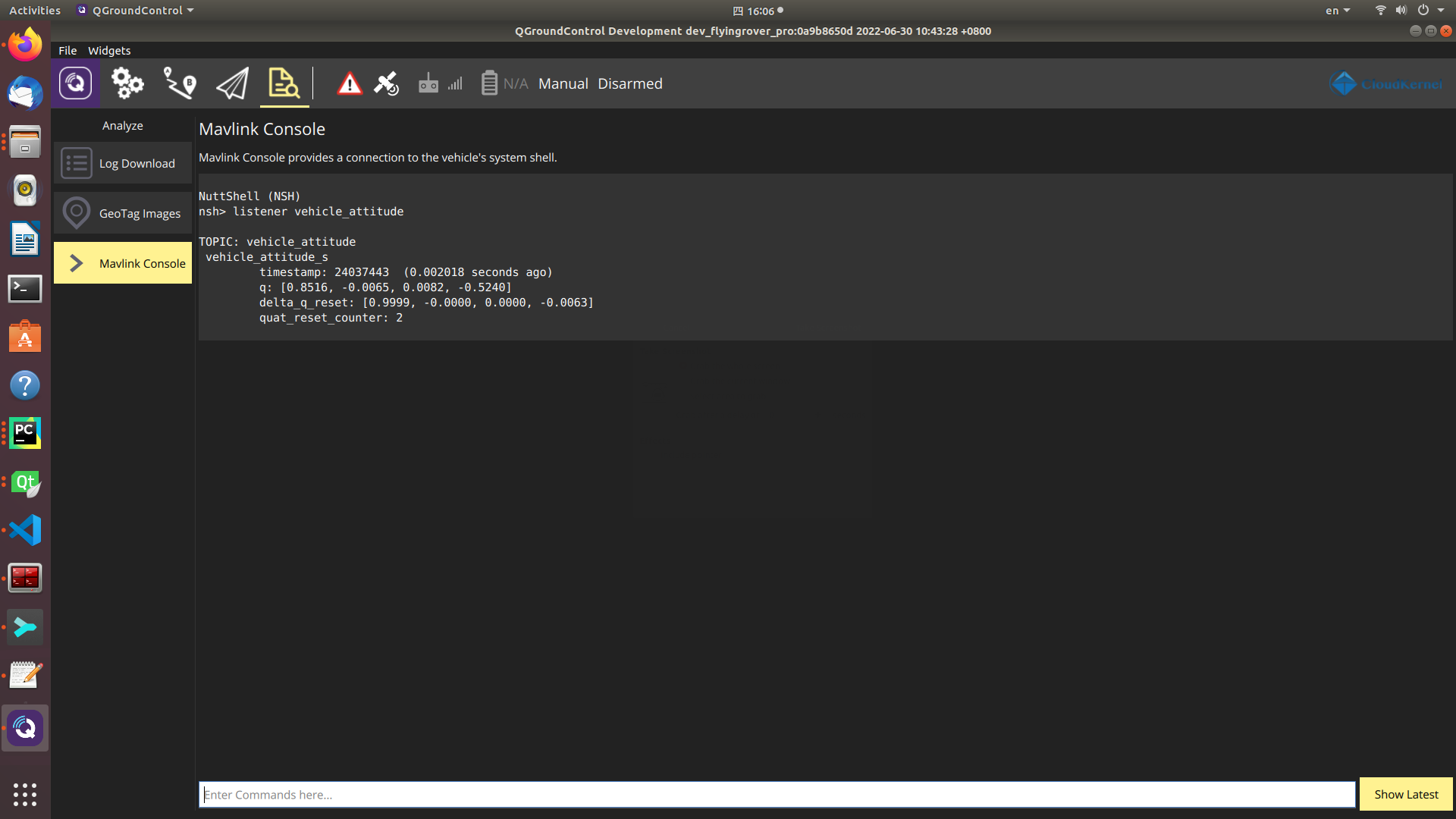
listener vehicle_attitude # display vehicle attitude from the sensor fusion module
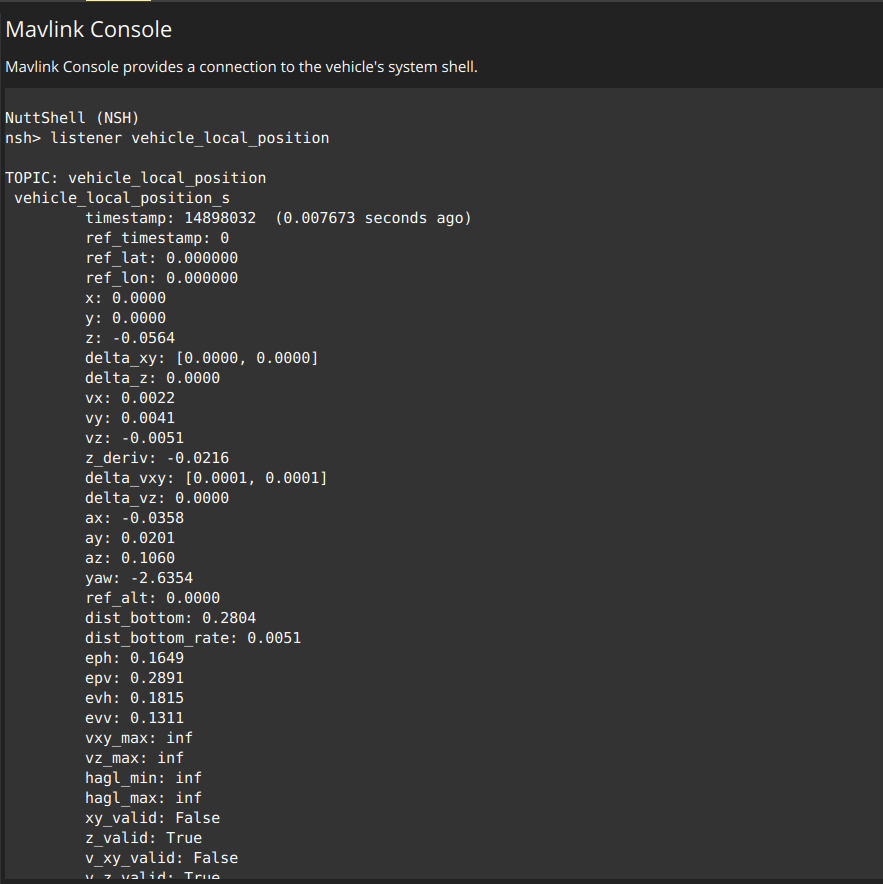
listener vehicle_local_position # display vehicle position and velocity from the sensor fusion module
Caution
字段 xy_valid、z_valid 和 v_xy_valid 表示定位状态,只有当所有这些字段都为 true 时,才能操作车辆。在 RTK 室外定位的情况下,eph 和 epv 的典型值应小于 1.0,以保证定位精度。
上层算法状态
对于具有避障功能的 RTK 导航方案,下面的命令可以显示障碍物状态、激光数据和规划器输出有效状态。
listener avoidance_status
下面列出了avoidance_status主题的定义:
bool flag_obstacle_in_far_front # Obstacle is in far front of the vehicle
bool flag_obstacle_far_nearby # Obstacle is in the neighbourhood of the vehicle with a large distance
bool flag_obstacle_in_front # Obstacle is at the front of the vehicle
bool flag_obstacle_in_rear # Obstacle is at the back of the vehicle
bool flag_obstacle_nearby # Obstacle is within a distance from the vehicle
bool flag_nav_task_active # True when navigation task is active onboard
bool flag_nav_local_plan_valid # The local plan from navigation is valid for obstacle avoidance
bool flag_laser_scan_data_valid # Laser scan data is valid for obstacle detection
Caution
当激光雷达数据在机载计算机中有效时,字段 flag_laser_scan_data_valid 为 true。