室内DASA系统定位进程启动
注意:此教程适用于DASA室内配置
DASA 室内配置利用 UWB(超宽带)定位进行机器定位,为求达到令用户满意的性能,专门研发了传感器融合中的复杂算法。在常规的室内环境下, 水平和垂直通道的定位精度分别可以达到0.1m和0.05m。本教程展示了如何启动室内 DASA 系统定位进程,用户请参阅官方 DASA 用户手册以获取完整说明。
1.场景设置
DASA 室内系统的设置非常简单。对于普通用户,建议最小场地面积为5m*5m,集群应用则需要更大面积。因为 UWB 信号可能不稳定,为避免电磁干扰,在现场设置时要注意与可疑干扰源保持距离。

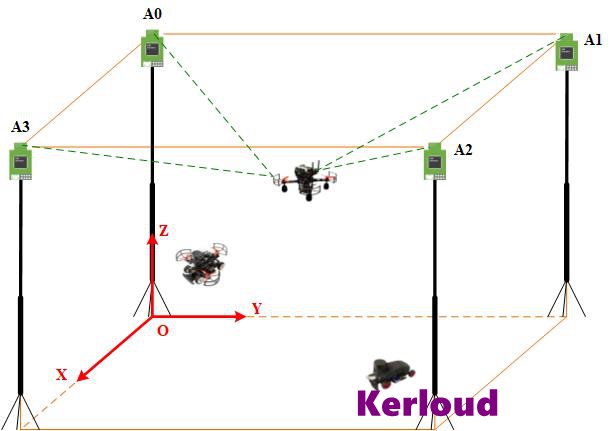
DASA室内的全局坐标系,简称DASA坐标系,如下图所示,遵循右手定则。DASA 坐标系的原点位于地面锚点 A0 的正下方。所有 DASA 机器人在本地网络中使用统一坐标系。请注意,UWB anchor 必须在第一次设置期间进行校准,以确保定位精度。
2. 定位程序工作区
定位程序工作区位于每个 DASA 机器人的 ~/DASA_space/catkinws_dasa 目录中,它由多个包组成,包括 uwb 设备驱动程序、mavros 网关、ros 集群通信、定位融合和可视化包。
使用前应正确配置工作区。首先,我们应将工作区中的代码与地面站中的最新版本进行同步更新,只需直接运行脚本并输入远程机器人 ID即可:
# on behalf of the ground control computer
cd ~/DASA_space/catkinws_dasa
bash scripts/sync/sync_workspace_remote.sh
其次,所有机器人都必须设置好正确的机器人类型和机器人 ID。 用户可以使用 ssh 命令登录到远程机器人,并执行以下命令并输入正确的机器人类型和 ID:
ssh ubuntu@ubuntu<i>
cd ~/DASA_space/catkinws_dasa
bash scripts/production/config_vehicle.sh
第三步,用户使用提供的 GUI 软件校准 UWB anchor,并使用 DASA 机器人测量 x 轴的偏航方向。然后如下图所示使用正确的数值编辑 uwb_localization 包中的 dasa_config.yaml。 最后使用~/DASA_space/catkinws_dasa/scripts/sync 目录下的 sync_dasa_config.sh 脚本,一次性将配置文件同步到所有 DASA 机器人。
# param: value
# initial yaw angle of DASA x axis in the ENU frame, should be measured with DASA agent, unit: rad, [-Pi, Pi]
yaw_dasa_x_axis_enu: 2.2
anchor_position:
# numbers must in x.x format(i.e: 5.0), indexed by order, anchor0-3
# loaded only for nl setup, RFU frame by default
- [ 0.0, 0.0, 0.0]
- [-0.433, 5.117, 0.0]
- [ 3.193, 5.222, 0.0]
- [ 2.904, 0.0, 0.0]
最后,用户需要在ros通讯包中编辑所需的话题,使这些话题可以在本地网络同步。下面列举了 8 辆 DASA 机器人的常规话题列表:
'/dasa/local_position/pose',/uav1/dasa/local_position/pose', '/uav1/dasa/local_position/velocity',
'/uav2/dasa/local_position/pose', '/uav2/dasa/local_position/velocity',
'/flyingrover3/dasa/local_position/pose', '/flyingrover3/dasa/local_position/velocity',
'/flyingrover4/dasa/local_position/pose', '/flyingrover4/dasa/local_position/velocity',
'/flyingrover5/dasa/local_position/pose', '/flyingrover5/dasa/local_position/velocity',
'/flyingrover6/dasa/local_position/pose', '/flyingrover6/dasa/local_position/velocity',
'/rover7/dasa/local_position/pose', '/rover7/dasa/local_position/velocity',
'/rover8/dasa/local_position/pose', '/rover8/dasa/local_position/velocity'
3. 如何使用
可以直接使用脚本轻松启动本地化过程,提供的脚本同时支持单机和集群。
单机情况:
# In remote vehicle terminal
ssh ubuntu@ubuntu<i>
cd ~/DASA_space/catkinws_dasa
# uav case
bash scripts/single_case/run_uav_default.sh
# rover case
bash scripts/single_case/run_rover_default.sh
# flying rover case
bash scripts/single_case/run_flyingrover_default.sh
集群情况:
# In remote vehicle terminal
ssh ubuntu@ubuntu<i>
cd ~/DASA_space/catkinws_dasa
# uav case
bash scripts/swarm_case/run_uav_default.sh
# rover case
bash scripts/swarm_case/run_rover_default.sh
# flying rover case
bash scripts/swarm_case/run_flyingrover_default.sh
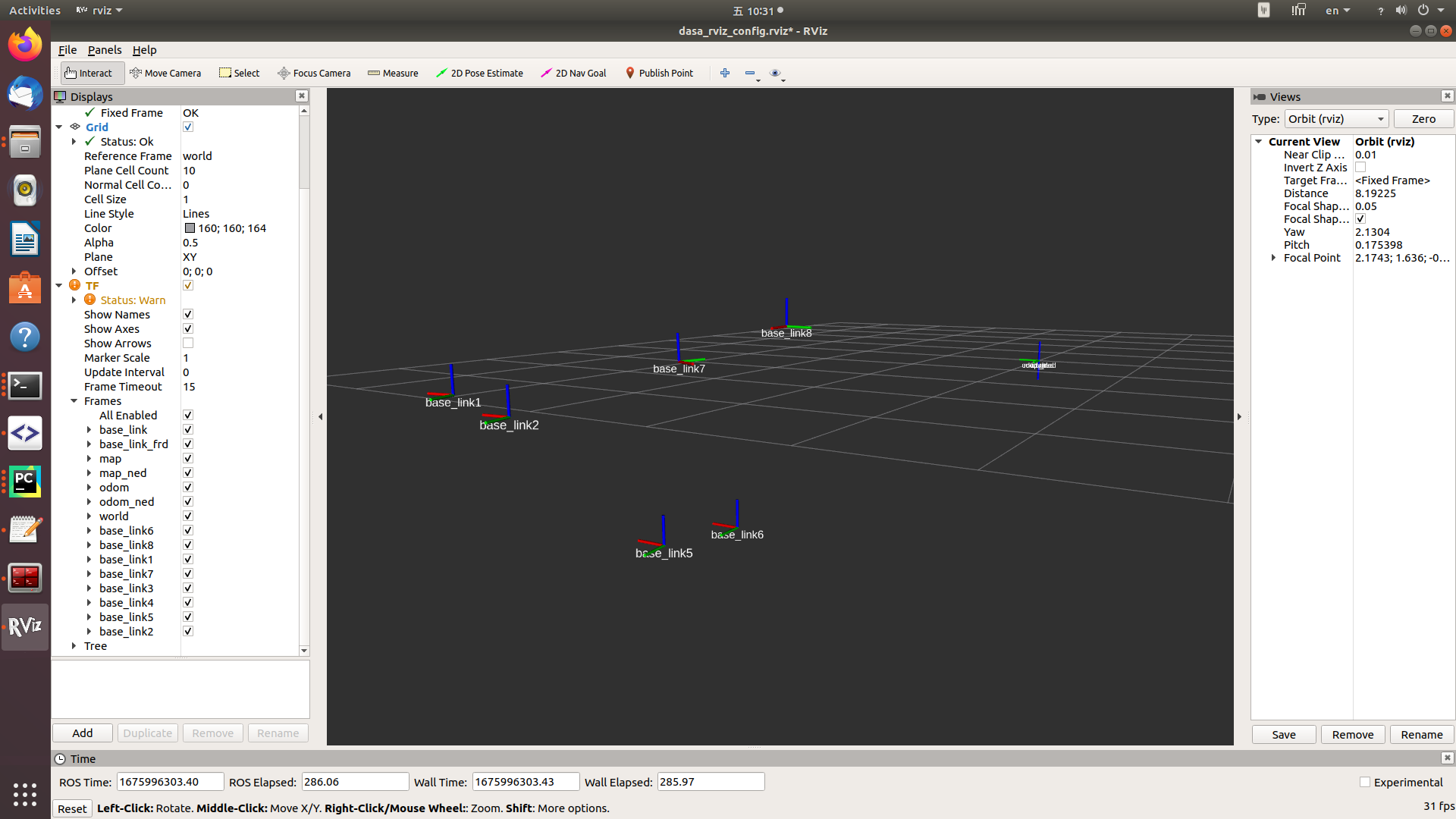
借助 dasa_visualization 包,DASA 机器人的定位也可以在地面站中实现可视化。
cd ~/DASA_space/catkinws_dasa
bash scripts/run_gcs_visualization.sh
多辆 DASA 机器人的定位可视化效果图如下图所示,其中 base_link<i> 表示第 i 台机器人在 DASA 坐标系中的 baselink。