DASA异构机器人仿真环境
此异构机器人集群虚拟仿真环境更加便于促进集群协作的开发,环境是基于 Gazebo 引擎构建的。
1.文件目录
虚拟仿真环境的工作空间位于~/DASA_space/virtual_simulation/catkinws_dasasim。
scripts/:该文件夹中包含启动虚拟仿真环境的便捷脚本
src/dasa_swarm_sim:该包中包含 Gazebo 环境设置的启动文件和脚本。
src/mavlink:该文件夹中包含为DASA系统设计的mavlink专用包,开源在GitHub仓库https://github.com/cloudkernel-tech/mavlink-gdp-release (dev_kerlouddasa branch)
src/mavros:该文件夹中包含为DASA系统设计的mavros专用包,开源在GitHub仓库https://github.com/cloudkernel-tech/mavros (dev_kerlouddasa branch)
2.软件依赖
虚拟仿真环境依赖位于 ~/DASA_space/virtual_simulation 中的 DASA 机器的虚拟仿真包。
3.如何使用
运行如下命令即可启动3台DASA机器的虚拟仿真功能:
bash scripts/run_swarm.sh
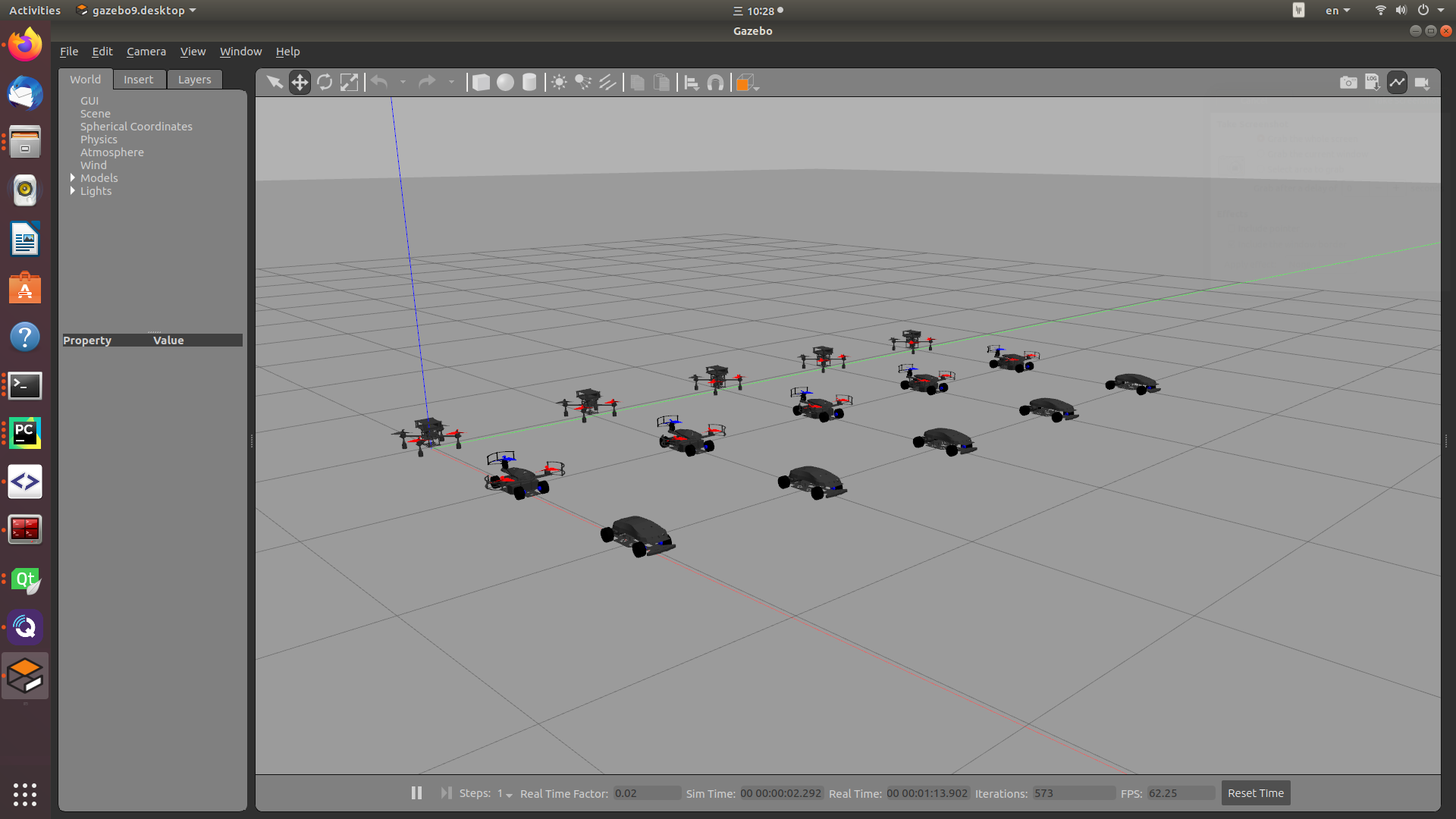
运行如下命令即可启动15台DASA机器(5台无人机、5台无人飞车、5台无人车)的虚拟仿真功能:
bash scripts/run_swarm_test.sh
上述脚本会为DASA机器启动 roscore、SITL 和 mavros 节点,然后用户可以利用 mavros 节点来操作这些机器。
请注意,对于上述第二种虚拟仿真情形,建议用户在功能强大的 PC 上运行,否则由于多个节点之间的密集通信,计算机可能无法响应。
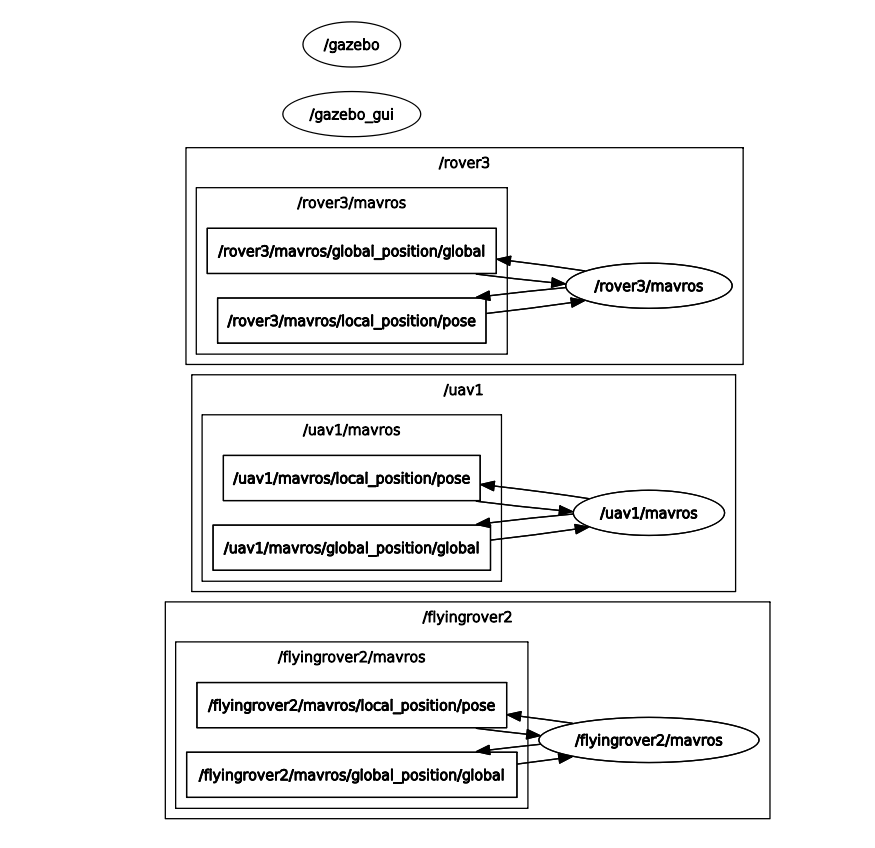
下面是虚拟仿真的 rqt 图示例:
15台DASA机器的虚拟仿真效果图如下所示: