Open CAN Protocol for AGV Chassis Integration
Due to increasing user demand for customized AGV Chassis integration, we decide to open the CAN protocol utilized by Pursuit autopilot. The CAN interface provides a reliable communication between the autopilot and the AGV Chassis, and it also permits further extension to other peripherals.
Protocol Configuration
The Pursuit autopilot supports the CAN 2.0B (extended format) protocol, which can be referred in https://www.ti.com/lit/an/sloa101b/sloa101b.pdf.

The configuration for our CAN protocol is:
Baud rate: 500K
Time Segment 1 (TSEQ1): 8
Time Segment 2 (TSEQ2): 3
Synchronization Jump Width (SJW): 2
Hint
Note that we utilize the FLU frame for velocities and steering angles in the protocol, namely X (Front), Y (Left), Z (Up), and the steering angle is positive when turning left.
Messages for Ackermann Chassis
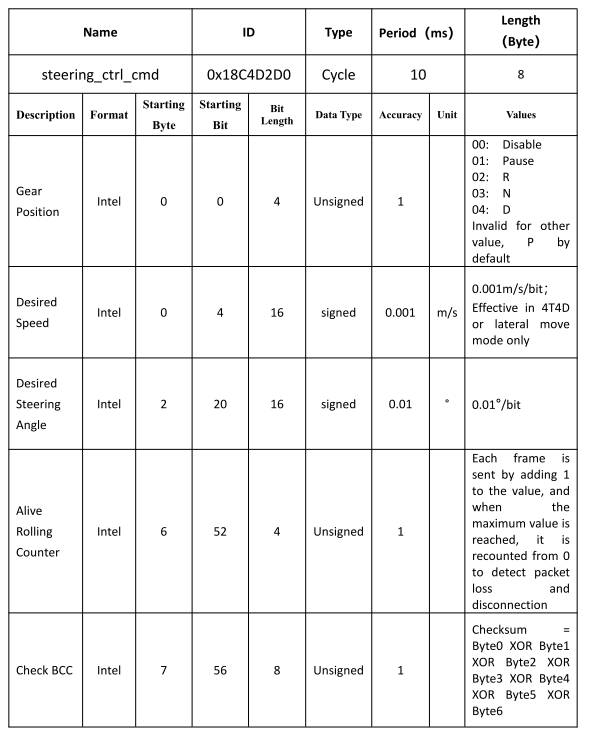
Steering Control Command
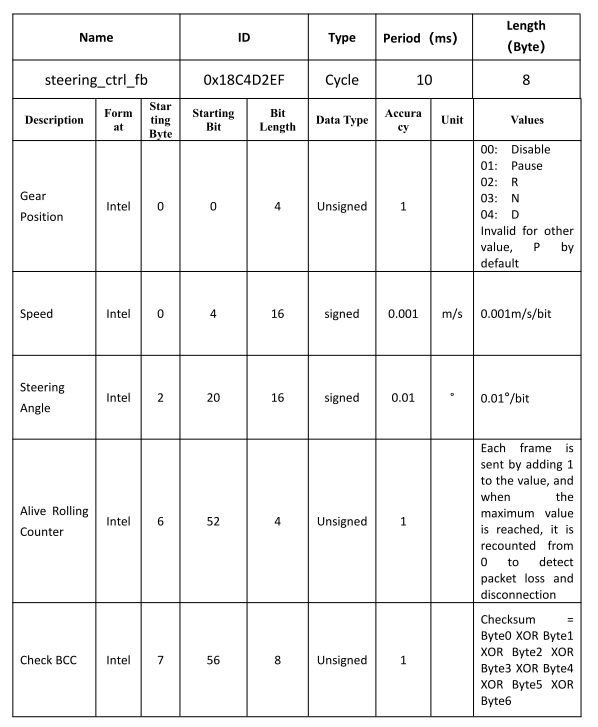
Control Feedback Command
The message shall be used together with the Steering Control Command, and it’s sent from the chassis to the autopilot.
Messages for 4WS-4WD Chassis
The 4WS-4WD (Four-Wheel Steering and Four-Wheel Drive) chassis is featured with its advanced maneuverability in confined space.
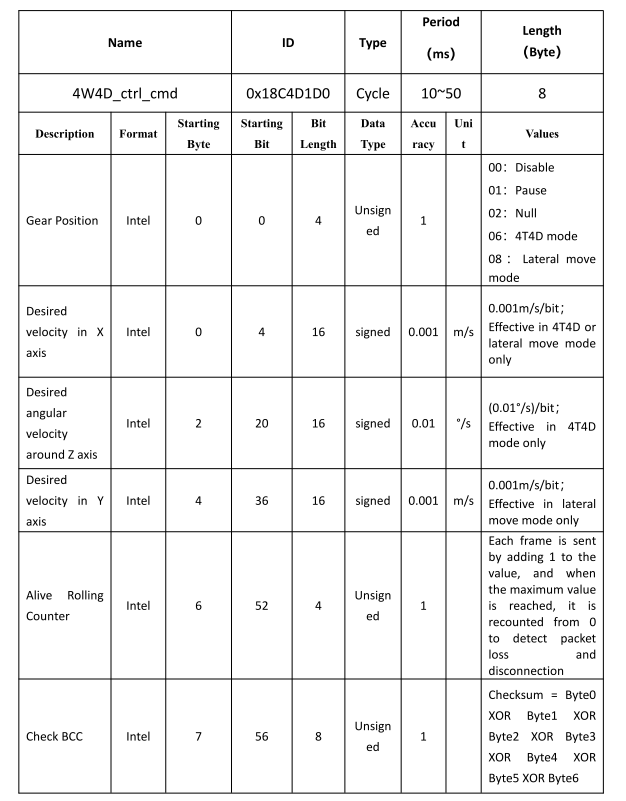
4WS-4WD Control Command
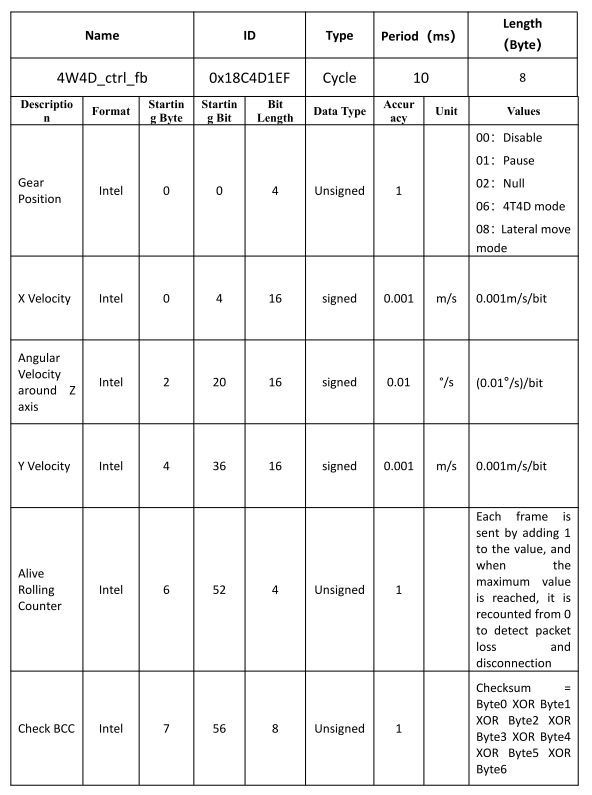
4W4D Control Feedback Command
The message shall be used together with the 4WS-4WD Control Command, and it’s sent from the chassis to the autopilot.