Console Interface in Ground Control Station
We provide convenience commands in the console interface of QGroundcontrol software. These commands can help users to monitor system status and locate malfunctions in hardware and software layers.
Sensor Layer Status
The Pursuit autopilot consists of multiple sensors for comprehensive sensor fusion, including accelerometer, gyroscope, barometer and magnetometer. The sensor data is critical to system operation, but these sensors are not error-proof as they can be degraded by long-term vibration, over-heat and humidity. Therefore, it’s always advisable for users to check sensor data first when the system doesn’t work as expected.
To view the sensor data in the autopilot, simple enter commands in the Mavlink Console:
listener sensor_accel # display accelerometer data
listener sensor_gyro # display gyroscope data
listener sensor_baro # display barometer data
listener sensor_mag # display magnetometer data
A sensor is problematic when there is no output from the corresponding command.
AGV Chassis Layer
The VCU unit of the AGV chassis is connected to the autopilot via a CAN bus.
To view the VCU status, simply try:
vcu_bridge status # display the driver status for VCU communication
listener vcu_base_status # display the vcu base status
listener vcu_control_cmd # display the command sent to the vcu base
Users can also test the AGV chassis with simple maneuvers by:
vcu_bridge test
RTK Layer Status
The RTK gps is connected to the autopilot via a serial port, and the gps data can be viewed by:
gps status # display the gps driver status
listener vehicle_gps_position #display gps data published to the sensor fusion module
Vehicle State
The vehicle state (attitude, position and velocity) can be viewed by:
listener vehicle_attitude # display vehicle attitude from the sensor fusion module
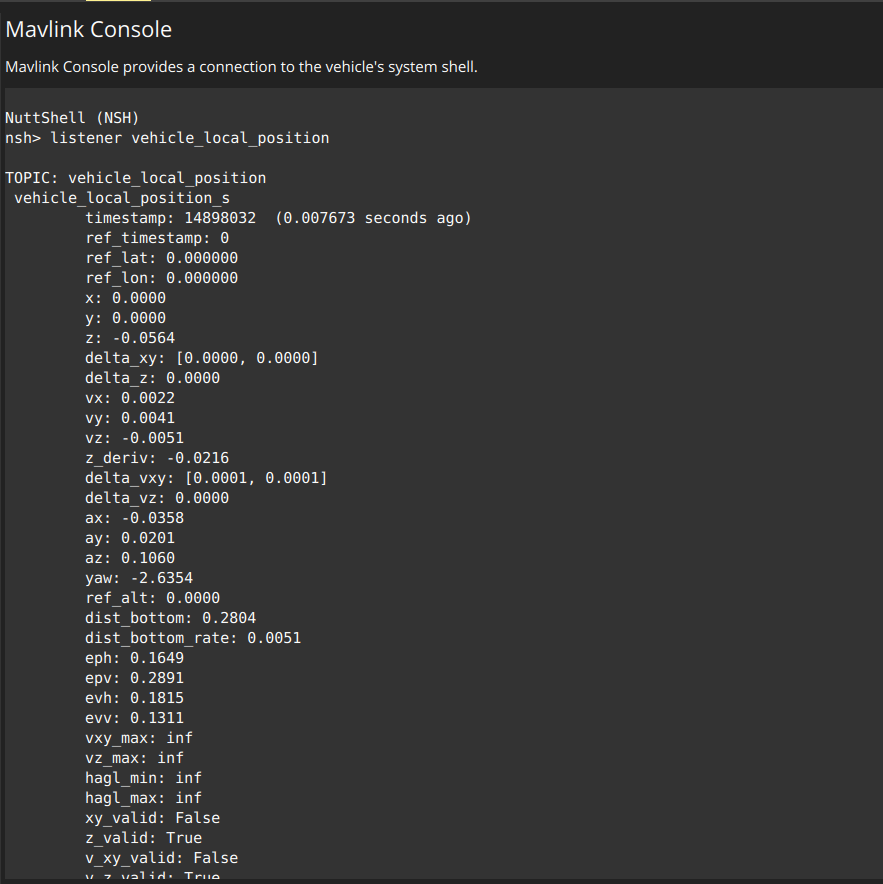
listener vehicle_local_position # display vehicle position and velocity from the sensor fusion module
Caution
📌 The fields xy_valid, z_valid and v_xy_valid indicate the localization status, and the vehicle can be operated only when all these fields are true. In the case of RTK outdoor localization, the typical value of eph and epv should be less than 1.0 to ensure positioning accuracy.
High-Level Algorithm Status
In the case of RTK navigation solution with obstacle avoidance functionality, the command below can show the obstacle status, laser data and planner output validity.
listener avoidance_status
The definition of avoidance_status topic is listed below.
bool flag_obstacle_in_far_front # Obstacle is in far front of the vehicle
bool flag_obstacle_far_nearby # Obstacle is in the neighbourhood of the vehicle with a large distance
bool flag_obstacle_in_front # Obstacle is at the front of the vehicle
bool flag_obstacle_in_rear # Obstacle is at the back of the vehicle
bool flag_obstacle_nearby # Obstacle is within a distance from the vehicle
bool flag_nav_task_active # True when navigation task is active onboard
bool flag_nav_local_plan_valid # The local plan from navigation is valid for obstacle avoidance
bool flag_laser_scan_data_valid # Laser scan data is valid for obstacle detection
Caution
The field flag_laser_scan_data_valid is true when the laser scanner data is valid in the companion computer.