使用RTK GPS实现高精度航路点驾驶
关于RTK GPS
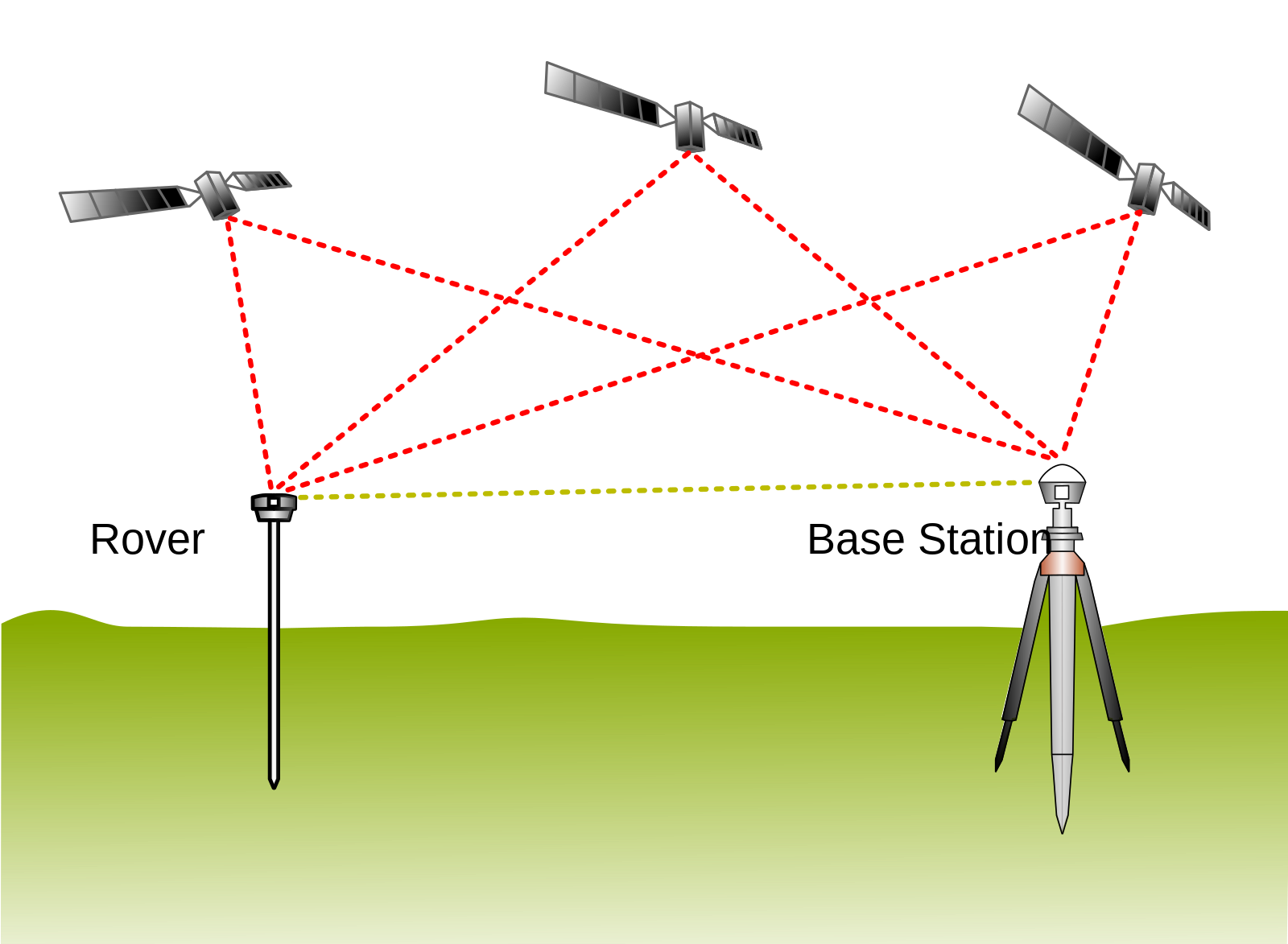
Kerloud autocar能够借助RTK GPS接收器实现厘米级精度的航路点任务。RTK(Real-time kinematic)GPS 在信号的信息内容基础上,还使用 GPS 信号载波相位的测量信息, 并依靠单个参考站来提供实时修正。RTK GPS 的设置可以参考下图,图片取自维基百科。
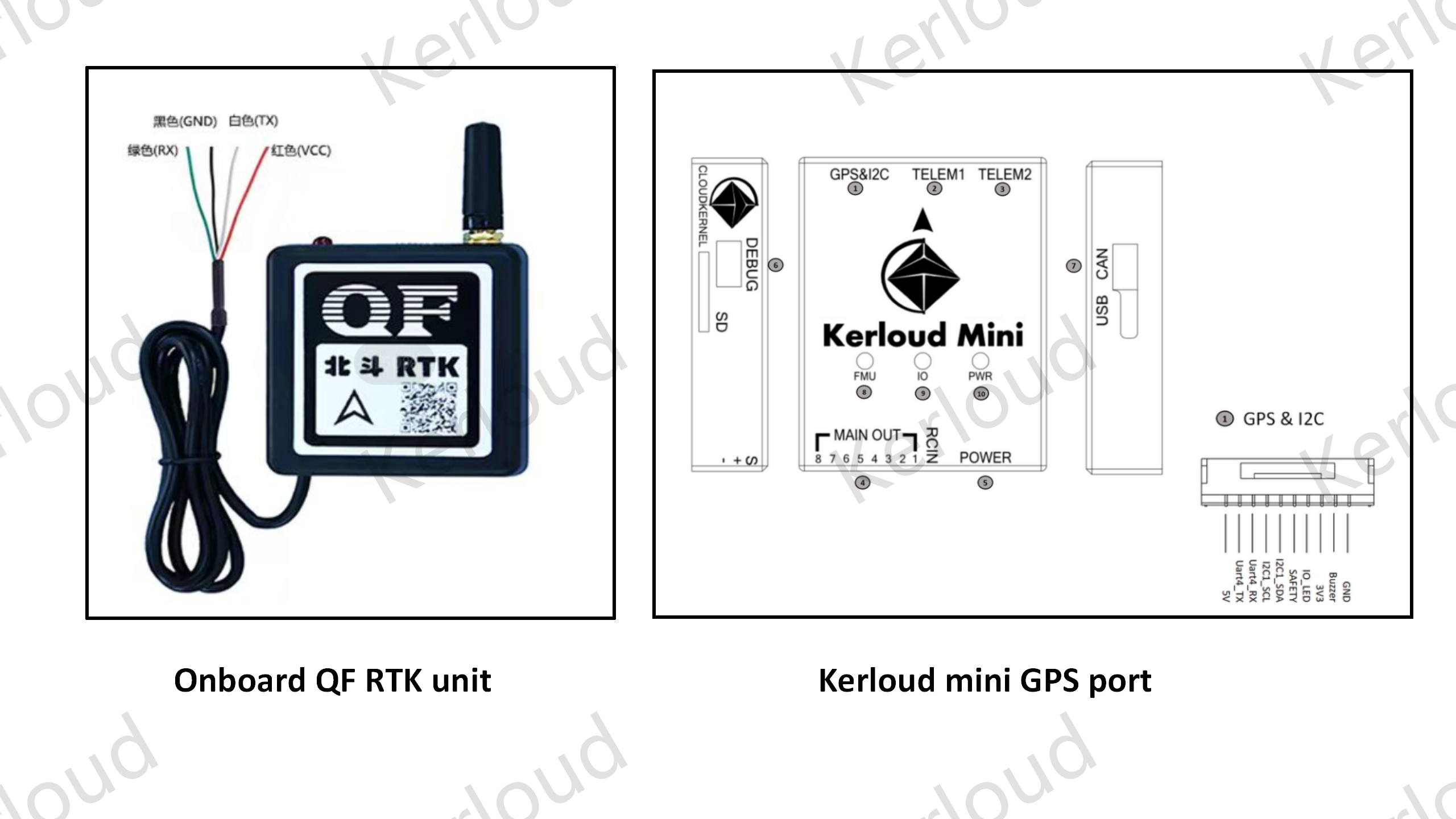
Kerloud autocar支持PX4社区中的各种RTK GPS(见 链接。 本文中,我们介绍另一款商用 RTK GPS 套件,全方 的 QF RTK 。普通室外环境下,QF RTK在半分钟以内即可开始提供厘米精度定位,最多可同时采集184颗卫星的信号。

硬件连接
机载 QF RTK 单元的硬件连接非常简单,该装置采用 UART 端口设计,无需额外供电。模块通过 GPS 端口接入我们的 Kerloud Mini自驾仪,如下图所示:
然后按下图所示将RTK单元安装到小车上:

Hint
有关 Kerloud Mini自驾仪的更多信息,请访问http://cloudkernel-tech.gitee.io/kerloud_mini/en/
软件设置
要启用 QF RTK 驱动程序,我们要做的就是将 SER_GPS1_BAUD 设置为 115200。自驾仪使用基于阿克曼自行车模型的改进型控制方案,大多数情况下用户不需要更改板载参数。以下参数在实际驾驶中可能很重要,建议用户在调整前将原始参数备份。
GND_ACT_ALG : 0:默认 px4 车体控制方案;1:阿克曼自行车动力学算法
GND_YAW_P:阿克曼自行车动力学算法中姿态控制的 P 增益
GND_MAX_YRATE:阿克曼自行车动力学算法中姿态控制的最大偏航率
GND_WHEEL_BASE : 车体前轴到后轴的距离
GND_SPEED_MAX:车体允许的最大速度
Hint
请咨询我们的售后了解更详细的调参以获得更好的性能,云讷科技可提供全栈式集成支持。
演示
配备 QF RTK 套件的 Kerloud autocar执行航路点任务演示如下。