用于AGV底盘集成的开放式CAN协议
由于用户对定制 AGV 底盘集成的需求不断增加,我们决定开放Pursuit自动驾驶仪使用的 CAN 协议。CAN 接口在自动驾驶仪和 AGV 底盘之间提供可靠的通信,它还允许进一步扩展到其他 外设。
协议配置
Pursuit 自动驾驶仪支持 CAN 2.0B(扩展格式)协议,该协议明细可参考 https://www.ti.com/lit/an/sloa101b/sloa101b.pdf 。

我们CAN协议的详细配置参数如下:
Baud rate: 500K
Time Segment 1 (TSEQ1): 8
Time Segment 2 (TSEQ2): 3
Synchronization Jump Width (SJW): 2
Hint
注意在协议中的转向与速度物理量均采用前左上(FLU)坐标系,即X(前),Y(左),Z(上),向左转动为正。
阿卡曼底盘协议
Steering Control Command (转向控制消息)

Control Feedback Command (控制反馈消息)
这个指令与 Steering Control Command 一同使用,由底盘发往自驾仪。

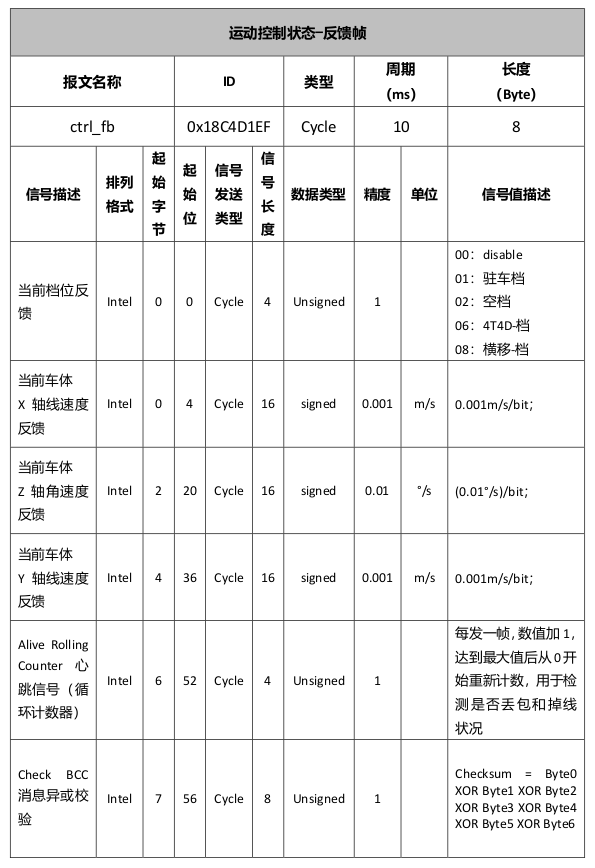
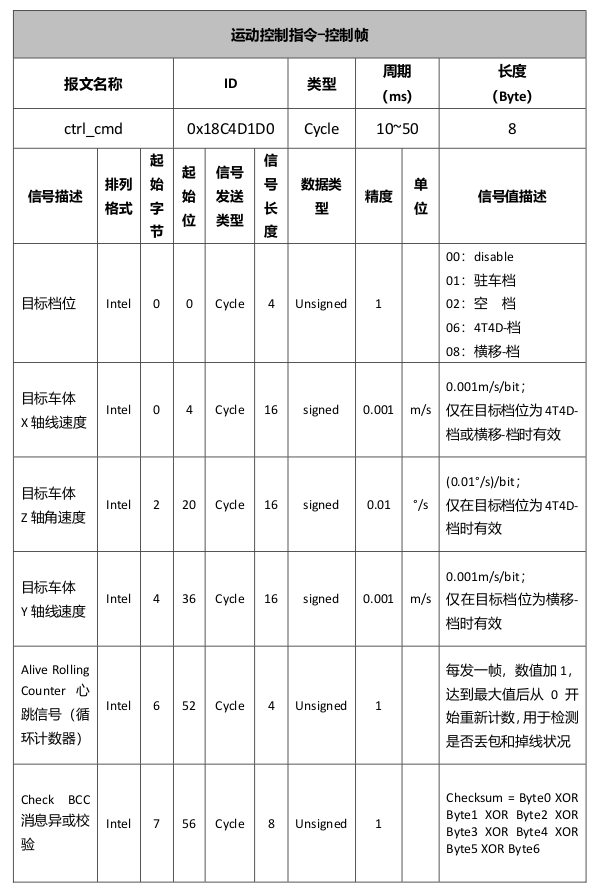
四转四驱底盘协议
4WS-4WD四转四驱(四轮转向和四轮驱动)底盘在狭窄空间内具有先进的机动性。
4WS-4WD Control Command(四转四驱控制消息)
4WS-4WD Control Feedback Command(四转四驱控制反馈消息)
这个指令与 4WS-4WD Control Command一同使用,由底盘发往自驾仪。