外围设备配置
外设配置可以通过 QGroundcontrol 软件中的参数设置界面轻松完成,如下所示。默认情况下,我们提供的产品在工厂为客户选择的外围设备进行了适当的配置。这里的文档 为用户侧的适配或变动提供参考。
无人车底盘
煜禾森机器人
MK ROBOT-01 阿卡曼车型

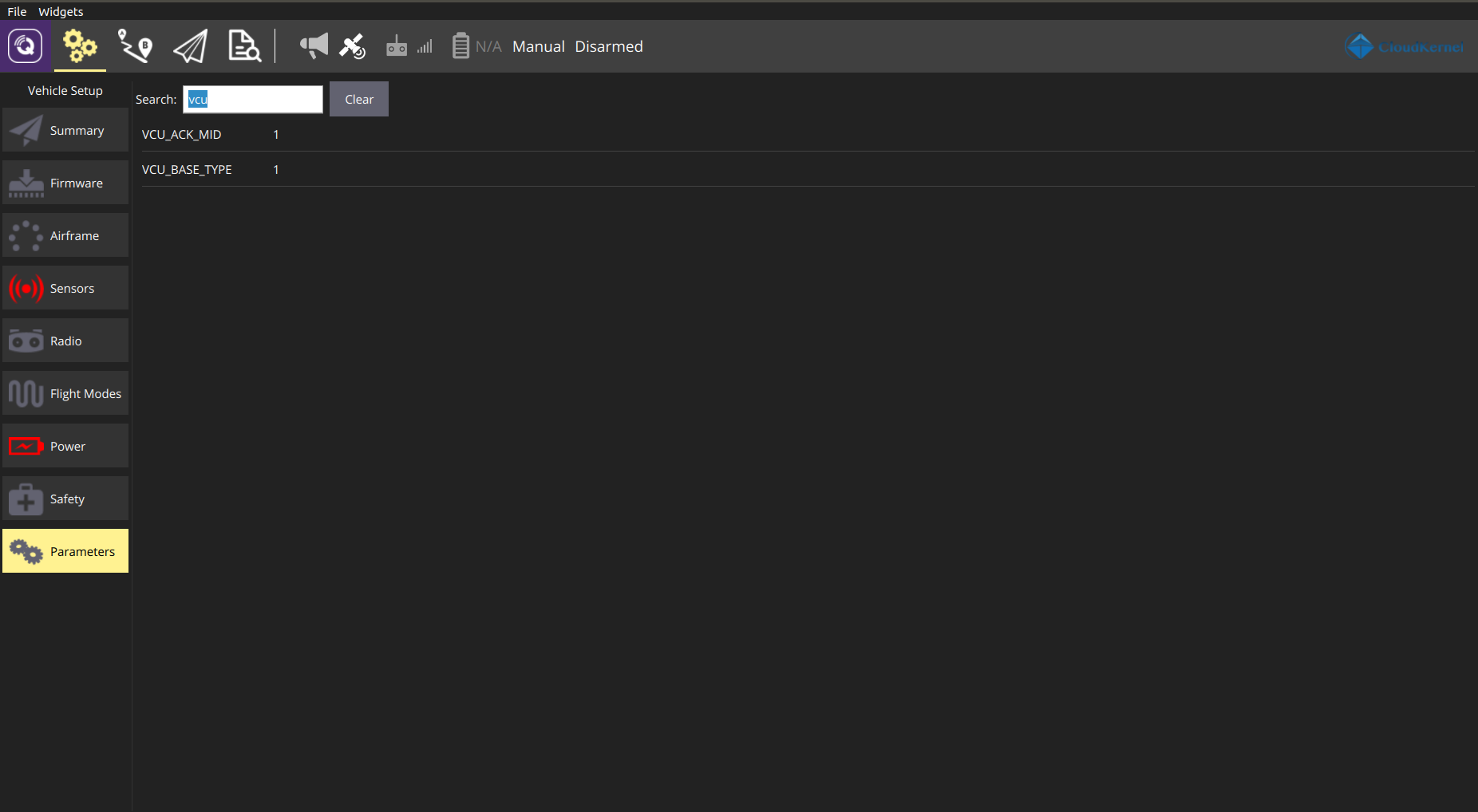
相关参数设置为:
VCU_BASE_TYPE = 1 # enable the ackermann vehicle type VCU_ACK_MID = 1 # model id for MK robot -01
FW-MAX 四转四驱车型

相关参数设置为:
VCU_BASE_TYPE = 2 # enable the 4 wheels differential drive vehicle type VCU_DD4_MID = 1 # model id for FW-max
RTK设备
QF RTK
R3C 流动RTK

相关参数设置为:
SER_GPS1_BAUD = 115200 # baud rate for RTK serial communication GPS_RTK_ID = 1 # model id
Comnav Technology
M100 RTK

使能M100 RTK(设置为comnav二进制协议)的参数为:
SER_GPS1_BAUD = 115200 # baud rate for RTK serial communication GPS_RTK_ID = 2 # model id