使用 ROS 驱动程序访问自驾仪
我们提供了定制的mavros包, 位于`mavros <https://gitee.com/cloudkernel-tech/mavros>`_ (分支dev_pursuit_agv), 面向高级开发者设计,并支持物联网通信和机器人模拟等扩展功能。
如何使用mavros包
在自驾仪端将参数设置为以下内容来启用与 mavros 包的接口:
SER_TEL2_BAUD = 921600 # the default baud rate for mavros interface
用户需在机载电脑上找到自动驾驶仪的 USB 端口(默认设置名称为/dev/ttyPursuit),然后使用以下命令启动节点:
cd ~/src/catkinws_nav
source devel/setup.bash
# launch for default port with 921600 baud rate
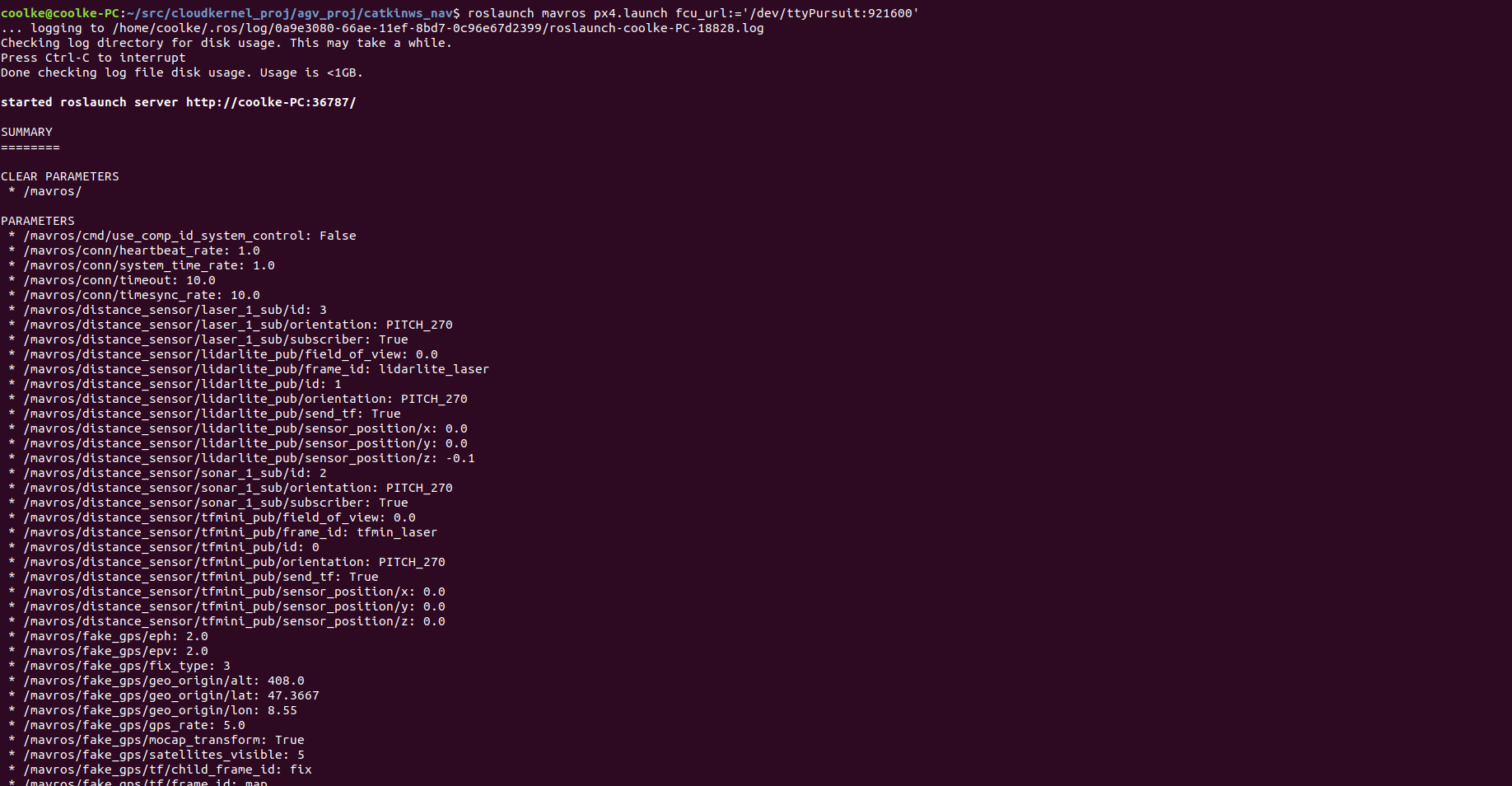
roslaunch mavros px4.launch fcu_url:='/dev/ttyPursuit:921600'
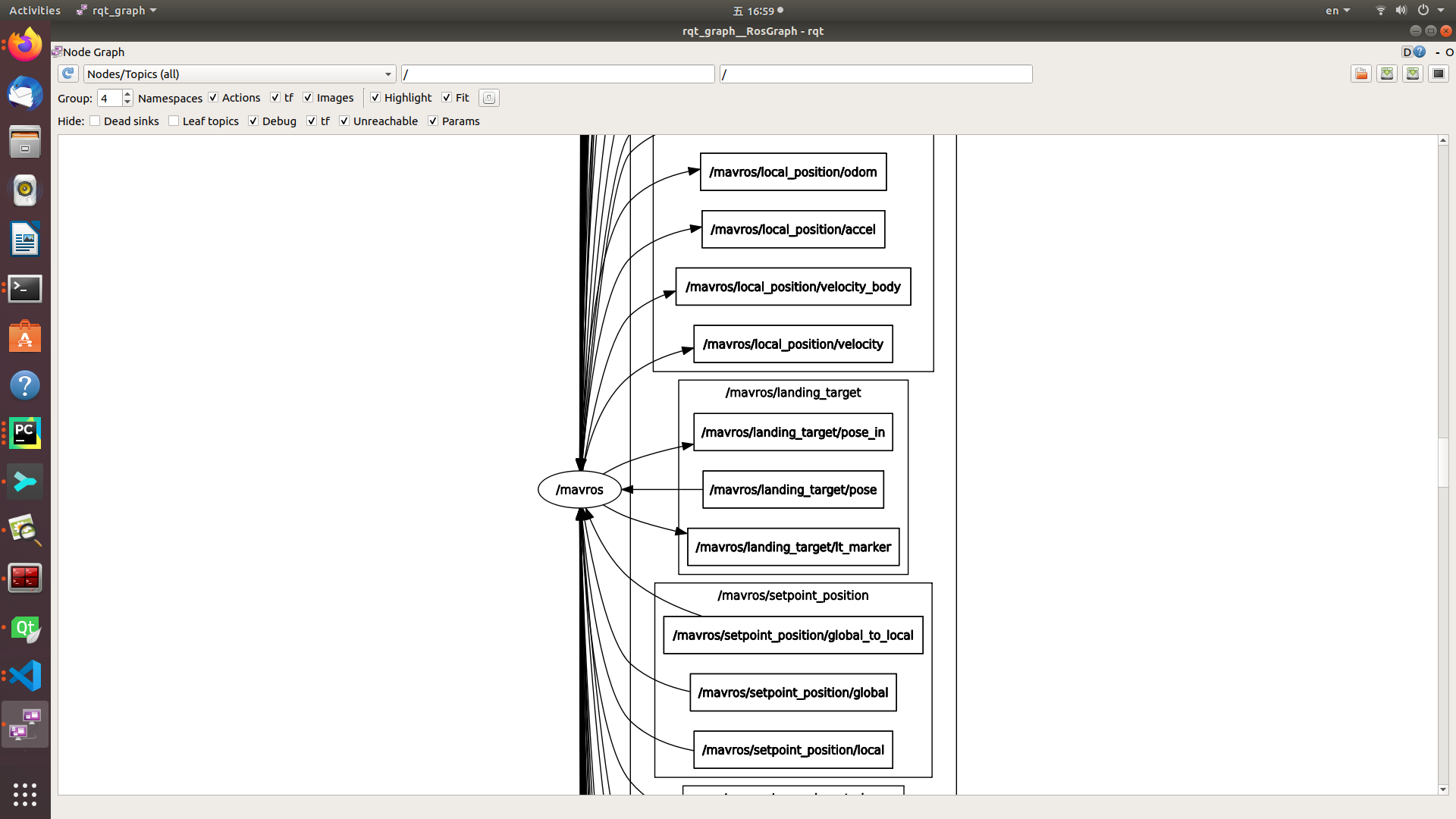
mavros节点的局部rqt graph视图是: